f2 (x, y) = f ░f (x, y) = f(x2, y) = (x4, y)
f3 (x, y) = f ░f ░f (x, y) = f( f2(x2, y) ) = f(x4, y) = (x8, y)
fn (x, y) =
(f ░╝░f)
n kappaletta
|
(x, y)
Kaikki nõmõ ovat jatkuvia.
Esimerkki 48
Mõõritellõõn funktio f(x, y) = (y, x2), R2 « R2 joka on jatkuva.
f2 (x, y) = f(y, x2) = (x2, y2)
f3 (x, y) = f( f2(x, y) ) = f(x2, y2) = (y2, x4)
f4 (x, y) = ╝ = (x4, y4) jne...
3 Differentiaalilaskenta
3.1 Osittaisderivaatta
Mõõritelmõ 1
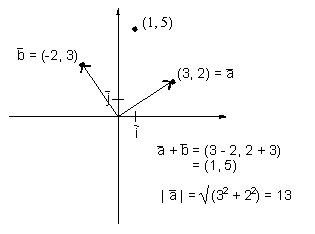
Olkoon [`(a)]
= (a1, a2) ╬ R2 ja f reaaliarvoinen funktio, joka
on mõõritelty ainakin [`(a)]:n jossakin ympõrist÷ssõ. Jos on olemassa raja-arvo
|
|
lim
h « 0
|
|
f(a1 + h, a2) - f(a1, a2)
h
|
, |
|
niin tõtõ sanotaan funktion f osittaisderivaataksi 1. muuttujan
suhteen (tai x:n suhteen) pisteessõ [`(a)]. Merkitõõn
|
D1f( |
a
|
), |
Âf
Âx1
|
( |
a
|
), |
Âf
Âx
|
( |
a
|
), fx1( |
a
|
), fóx1( |
a
|
). |
|
Vastaavasti mõõritellõõn f:n osittaisderivaatta toisen muuttujan suhteen
raja-arvona
|
|
lim
h « 0
|
|
f(a1, a2 + h) - f(a1, a2)
h
|
|
|
Tõtõ merkitõõn
|
D2 f( |
a
|
), |
Âf
Âx2
|
( |
a
|
), |
Âf
Ây
|
( |
a
|
) jne. |
|
Sanotaan, ettõ funktio f on derivoituva pisteessõ [`(a)], jos derivaatat
D1 f ([`(a)]) ja D2 f ([`(a)]) ovat olemassa.
Jos funktio f on derivoituva joukon A jokaisessa pisteessõ, niin
f on derivoituva joukossa A.
Esimerkki 2
Olkoon
Tõll÷in
|
D1 f (1, 0) = |
lim
h « 0
|
|
f(1 + h, 0) - f(1, 0)
h
|
= |
lim
h « 0
|
|
0 - 0
h
|
= 0 |
|
ja
|
D2 f (1, 0) = |
lim
h « 0
|
|
f(1, h) - f(1, 0)
h
|
= |
lim
h « 0
|
|
h3
h2h
|
= |
lim
h « 0
|
1 = 1. |
|
Olkoon f kuten yllõ. Pitõen muuttujaa y kiinteõnõ mõõritellõõn x:n funktio
g(x) : = f(x, y). Silloin
|
gó(x) = |
lim
h « 0
|
|
g(x + h), y) - g(x)
h
|
= |
lim
h « 0
|
|
f(x + h, y) - f(x, y)
h
|
= |
Âf
Âx
|
(x, y). |
|
Nõemme siis, ettõ osittaisderivaatta x:n suhteen voidaan muodostaa tuttuja derivoimissõõnt÷jõ
kõyttõen (pitõmõllõ y vakiona).
Esimerkki 3
Jos
|
f(x, y) = x3y2 + x4 siny, |
|
on osittaisderivaatta
|
D1 f(x, y) = 3y2 x2 + 4 x3 siny. |
|
Jos
on osittaisderivaatta
|
D1 g(x, y) = 0 + exy · |
Â(xy)
Âx
|
= exyy. |
|
Vastaavasti [(Â)/(Ây)] muodostetaan pitõmõllõ x:õõ
vakiona (f ja g kuten yllõ):
Useamman muuttujan funktion osittaisderivaatat
Olkoon funktio g mõõritelty pisteen [`(a)]
=(a1, ╝, an) ╬ Rn
ympõrist÷ssõ, ja j ╬ { 1, ╝, n }. Raja-arvot
|
|
Âg
Âxj
|
= |
lim
h « 0
|
|
g(a1, ╝, aj + h, ╝, an) - g(a1, ╝, aj, ╝, an)
h
|
|
|
on osittaisderivaatta j:nen muuttujan suhteen, ja sitõ merkitõõn Dj g([`(a)]).
Esimerkki 4
Mõõritellõõn funktio
|
f(x1, x2, x3, x4) = x12 x3 + sin(x2 + x4) + ex1 + x4. |
|
Sen osittaisderivaatat ovat
|
|
| | |
2x1 x3 + 0 + ex1 + x4 · |
D1(x1 + x4)
= 1
|
= 2x1 x3 + ex1 + x4 |
|
| | |
0 + cos(x2 + x4) + 0 = cos(x2 + x4) |
|
| | |
| | |
|
|
|
Huomautamme, ettõ derivoituvan funktion ei tarvitse olla jatkuva.
Esimerkki 5
Funktio
ei ole jatkuva pisteessõ [`0] = (0, 0), mutta
|
D1 f(0, 0) = |
lim
h « 0
|
|
f(h, 0) - f(0, 0)
h
|
= |
lim
h « 0
|
|
1 - 1
h
|
= 0, D2 f(0, 0) = 0. |
|
3.2 Korkeamman kertaluvun derivaatat
Jos derivaatta Dj f on olemassa pisteen [`(a)] ympõrist÷ssõ
ja Dj f on derivoituva k:nen muuttujan suhteen, saadaan 2. kertaluvun osittaisderivaatta
|
Djk f( |
a
|
) = |
µ
Þ
|
Dk (Dj f) |
÷
°
|
( |
a
|
) |
|
(j, k ╬ { 1, ╝, n }, kun f on n:n muuttujan funktio). Merkitõõn
my÷s
Vastaavasti mõõritellõõn funktion f korkeamman kertaluvun osittaisderivaatat
ja niin edelleen. Sanotaan, ettõ f on m kertaa jatkuvasti derivoituva, jos kaikki enintõõn
kertalukua m olevat osittaisderivaatat ovat olemassa ja jatkuvia.
Esimerkki 1
Funktion
|
f(x, y, z) : = x3y2 + x4siny + cos(xz) |
|
osittaisderivaatat ovat
|
|
| | |
3y2x2 + 4x3siny - zsin(xz) |
|
| | |
| | |
|
|
|
Põteek÷ D12 = D21?
|
|
| | |
6xy2 + 12x2siny - z2cos(xz) |
|
| | |
| | |
| | |
D2(D1 f) = 6x2y + 4x3cosy |
|
| | |
D1(D2 f) = 6x2y + 4x3cosy |
|
| | |
D3(D1 f) = -sin(xz) - xz cos(xz) |
|
| | |
D1(D3 f) = -sin(xz) - xz cos(xz) |
|
| | |
| | |
|
|
|
Esimerkki 2
Mõõritellõõn funktio
Kun (x, y) ╣ (0, 0):
|
|
|
D1 f = D1 |
µ
Þ
|
xy(x2 - y2)
x2 + y2
|
÷
°
|
|
| | |
|
(3x2y - y3)(x2 + y2) - 2x(x3y - xy3)
(x2 + y2)2
|
|
|
| | |
|
4x2y3 + x4y - y5
(x2 + y2)2
|
|
|
|
|
| (6) |
ja
|
D2 f = ╝ = |
x5 - 4x3y2 - xy4
(x2 + y2)2
|
. |
| (7) |
Tuloksesta (6) seuraa
|
D1 f(0, y) = |
0 ·y3 + 0 ·y - y5
(02 + y2)2
|
= |
-y5
y4
|
= -y, kun y ╣ 0, |
| (8) |
ja tuloksesta (7)
|
D2 f(x, 0) = ╝ = x, x ╣ 0. |
| (9) |
Osittaisderivaatat origossa ovat
|
D1f(0, 0) = |
lim
h « 0
|
|
f(h, 0) - f(0, 0)
h
|
= |
lim
h « 0
|
|
h ·0 ·(h2 - 02)
h2 + 0
|
- 0 |
h
|
= |
lim
h « 0
|
|
0
h
|
= 0 |
| (10) |
ja
|
D2 f(0, 0) = |
lim
h « 0
|
|
f(0, h) - f(0, 0)
h
|
= ╝ = 0. |
| (11) |
Nyt tuloksien (8) ja (10) avulla saadaan
|
D12 f(0, 0) = D2(D1 f)(0, 0) = |
lim
h « 0
|
|
D1 f(0, h) - D1 f(0, 0)
h
|
= |
lim
h « 0
|
|
-h - 0
h
|
= -1 |
|
ja tuloksista (9) ja (11)
|
D21 f(0, 0) = D1(D2 f)(0, 0) = |
lim
h « 0
|
|
D2 f(h, 0) - D2 f(0, 0)
h
|
= |
lim
h « 0
|
|
h - 0
h
|
= 1. |
|
On kuitenkin vain erikoistapaus, ettõ osittaisderivaatat saavat eri arvot.
Lause 3
Olkoon funktio f reaaliarvoinen kuvaus, joka on mõõritelty pisteen
(a, b) ╬ R2 ympõrist÷ssõ. Oletetaan, ettõ D12 f ja D21 f
ovat olemassa pisteen (a, b) ympõrist÷ssõ ja jatkuvia ainakin pisteessõ
(a, b). Silloin
|
D12 f(a, b) = D12 f(a, b). |
|
Todistus sivuutetaan.
Esimerkki 4
Olkoon
Osittaisderivaatat
Olkoon f = (f1, ╝, fn) pisteen [`(a)] ╬ Rm ympõrist÷ssõ
mõõritelty vektoriarvoinen kuvaus. Mõõritellõõn
funktion f osittaisderivaatta xj:n suhteen pisteessõ [`(a)] raja-arvona
|
Dj f( |
a
|
) = |
lim
h « 0
|
|
f(a1, ╝, aj + h, ╝, am) - f(a1, ╝, am)
h
|
|
|
mikõli raja-arvo
on olemassa. Ei ole vaikea osoittaa, ettõ osittaisderivaatta saadaan
derivoimalla komponenttifunktiot:
|
Dj f( |
a
|
) = |
µ
Þ
|
Dj f1( |
a
|
), ╝, Dj fn( |
a
|
) |
÷
°
|
. |
|
Esimerkki 5
Olkoon m = 2, n = 3 ja
|
f(x, y) = |
µ
Þ
|
sin(x + y), x2, exy |
÷
°
|
. |
|
Osittaisderivaatat ovat
|
|
| | |
|
µ
Þ
|
cos(x + y), 2x, yexy |
÷
°
|
|
|
| | |
|
µ
Þ
|
cos(x + y), 0, xexy |
÷
°
|
. |
|
|
|
|
Lause 6
Olkoon funktio f mõõritelty pisteessõ [`(a)] ╬ Rm, reaaliarvoinen.
Jos osittaisderivaatat Dij f ja Dji f, i < j, ovat olemassa pisteen
[`(a)] ympõrist÷ssõ ja jatkuvia pisteessõ [`(a)], niin
|
Dij f( |
a
|
) = Dji f( |
a
|
), i, j ╬ {1, ╝, m}. |
|
Todistus.
Olkoon [`(a)]
= (a1, ╝, am). Mõõritellõõn
|
g(x, y) : = f(a1, ╝, ai - 1, x, ai + 1, ╝, aj - 1, y, aj + 1, ╝, am) |
|
joka on kahden muuttujan funktio. Funktiolle g põtee: x on mõõritelty
pisteen [`(a)]ó = (ai, aj) ╬ R2 ympõrist÷ssõ, D1 g, D2 g mõõritelty
[`(a)]ó:n ympõrist÷ssõ jne...
Sovelletaan lausetta 3.2.3.
|
Dij f( |
a
|
) = D12 g(ai, aj) = D21 g(aj, ai) = Dji f( |
a
|
). |
|
[¯]
Esimerkki 7
Jos h : R4 « R ja kaikki osittaisderivaatat kertalukuun 5 asti ovat
jatkuvia, niin
|
D1234 h = D4321 h = D1432 h = ╝ |
|
Mutta tietenkõõn ei põde esimerkiksi D213 h = D223 h.
3.3 Differentioituvuus
Yhden muuttujan funktio f on derivoituva pisteessõ x0 ╬ R jos ja vain jos
on olemassa a ╬ R siten, ettõ
|
f(x0 + h) - f(x0) = ah + he(h), |
|
missõ e on reaalimuuttujan funktio, mõõritelty 0:n ympõrist÷ssõ
ja e(h) « 0, kun h « 0. Silloin a = Df(x0).
Tutkitaan samaa asiaa kahden muuttujan funktioille. Olkoon [`(a)]
= (a1, a2)
tarkastelupiste ja oletetaan, ettõ funktio f on mõõrõtty pisteen [`(a)] jossakin
ympõrist÷ssõ U. Oletetaan, ettõ [`(h)] ╬ R siten, ettõ
[`(a)]+ [`(h)] ╬ U.
Mõõritelmõ 1
Funktio f on differentioituva pisteessõ [`(a)], jos on olemassa luvut
a1 ja a2 siten, ettõ
|
f( |
a
|
+ |
h
|
) - f( |
a
|
) = a1 h1 + a2 h2 + |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
), |
| (12) |
missõ e on jossain origon ympõrist÷ssõ V mõõritelty funktio V « R ja
e([`(h)]) « 0 kun [`(h)]«[`0].
Jos merkitõõn [`(a)] = (a1, a2), niin (12)
voidaan kirjoittaa muodossa
|
f( |
a
|
+ |
h
|
) - f( |
a
|
) = |
a
|
· |
h
|
+ |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
). |
|
Mõõritelmõ 2
Olkoon A ╬ R2. Funktio f: A « R on differentioituva joukossa A, jos
se on differentioituva jokaisessa pisteessõ [`(a)] ╬ A.
Lause 3
Jos funktio f on differentioituva pisteessõ [`(a)], niin se on jatkuva pisteessõ
[`(a)].
Todistus.
Olkoon s > 0. On l÷ydettõvõ r > 0 siten, ettõ
|
|
Û
Û
|
f( |
x
|
) - f( |
a
|
) |
Û
Û
|
< s, kun |
Û
Û
|
|
x
|
- |
a
|
|
Û
Û
|
< r. |
|
Olkoon e kuten kaavassa (12), samoin
[`(a)] = (a1, a2). Voidaan l÷ytõõ só siten, ettõ
| e(h) | < 1, kun | [`(h)] | < só. Valitaan
r = min( só, [(s)/(| [`(a)] | + 1)] ). Olkoon nyt
[`(x)] sellainen, ettõ | [`(x)]- [`(a)] | < r. Tõll÷in (merkitõõn [`(h)]
= [`(x)]- [`(a)])
|
|
| | |
|
Û
Û
|
f( |
a
|
+ |
h
|
) - f( |
a
|
) |
Û
Û
|
= |
Û
Û
|
|
a
|
· |
h
|
+ |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
) |
Û
Û
|
|
|
| | |
|
Û
Û
|
|
a
|
· |
h
|
|
Û
Û
|
+ |
Û
Û
|
|
h
|
|
Û
Û
|
|
Û
Û
|
e( |
h
|
) |
Û
Û
|
ú |
Û
Û
|
|
h
|
|
Û
Û
|
|
µ
Þ
|
|
Û
Û
|
|
a
|
|
Û
Û
|
+ |
Û
Û
|
e( |
h
|
) |
Û
Û
|
|
÷
°
|
|
|
| | |
|
Û
Û
|
|
x
|
- |
a
|
|
Û
Û
|
|
µ
Þ
|
|
Û
Û
|
|
a
|
|
Û
Û
|
+ 1 |
÷
°
|
< r |
µ
Þ
|
|
Û
Û
|
|
a
|
|
Û
Û
|
+ 1 |
÷
°
|
ú |
s
|
|
µ
Þ
|
Û
Û
|
|
a
|
|
Û
Û
|
+ 1 |
÷
°
|
= s. |
|
|
|
|
[¯]
Lause 4
Jos funktio f on differentioituva pisteessõ [`(a)], niin f on derivoituva ja
Todistus.
Tapaus j = 1.
|
f( |
a
|
+ |
h
|
) - f( |
a
|
) = a1 h1 + a2 h2 + |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
), |
|
missõ e([`(h)]) « 0 kun [`(h)]« 0. Tõmõ põtee, kun [`(h)] on jossakin [`0]:n
ympõrist÷ssõ. Erityisesti voidaan tarkastella tapausta [`(h)]
= (h1, 0), missõ h1 > 0.
Muodostetaan
|
|
| | |
|
f(a1 + h1, a2) - f(a1, a2)
h1
|
= |
a1 h1
h1
|
+ |
h1
|
e( |
h
|
) |
|
| | |
|
|
|
kun [`(h)]«[`0].
Tõmõ todistaa, ettõ D1 f([`(a)]) = a1, koska osittaisderivaatan mõõritelmõn mukaan
on toisaalta
|
|
lim
h1 « 0
|
|
f(a1 + h1, a2) - f(a1, a2)
h1
|
= D1 f( |
a
|
). |
|
Toinen muuttuja kõsitellõõn vastaavasti.
[¯]
Differentioituvuus ja muut edellõ mainitut tulokset mõõritellõõn ja todistetaan samalla tavalla
n:n muuttujan funktioille.
Esimerkki 5
Funktion
molemmat osittaisderivaatat D1 f(x, y), D2 f(x, y) saavat origossa arvon 0.
Voidaan kuitenkin osoittaa, ettei f ole differentioituva origossa.
Lause 6
Jos funktio f on derivoituva jossakin pisteen [`(a)] ympõrist÷ssõ ja
osittaisderivaatat ovat jatkuvia pisteessõ [`(a)], niin f on differentioituva pisteessõ
[`(a)].
Esimerkki 7
Onko funktio f(x, y, z) : = x2y| z | + xy differentioituva pisteessõ (2, 0, 0)?
Ratkaisu.
|
|
| | |
| | |
| | |
|
lim
h « 0
|
|
f(2, 0, n) - f(2, 0, 0)
h
|
= |
lim
h « 0
|
|
0 - 0
h
|
= 0 |
|
| | |
| | |
|
|
|
Funktio f on siis derivoituva pisteessõ (2, 0, 0). Funktio f on differentioituva
pisteessõ (2, 0, 0), jos
|
f(2 + h1, h2, h3) - f(2, 0, 0) = D1 f(2, 0, 0)h1 +D2 f(2, 0, 0)h2 + D3 f(2, 0, 0)h3 + |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
), |
|
missõ e« 0 kun | [`(h)] | « 0.
Ratkaistaan tõstõ e ja tutkitaan sen kõyttõytymistõ, kun
| [`(h)] | « 0.
|
|
| | |
|
f(2 + h1, h2, h3) - f(2, 0, 0) - 2h2
|
|
|
| | |
|
(2 + h1)2h2| h3 | + (2 + h1)h2 - 2h2
|
|
|
| | |
(2 + h1)2| h3 | |
h2
|
+ h1 |
h2
|
|
|
| | |
(2 + h1)2 | h3 | + | h1 | « 0 |
|
|
|
|
kun [`(h)]« 0.
Tõssõ
joten funktio f on differentioituva.
Lauseke
|
D1 f( |
a
|
)h1 + D2 f( |
a
|
)h2 + ╝+ Dn f( |
a
|
)hn |
|
on nimeltõõn funktion f differentiaali pisteessõ [`(a)], merkitõõn
d f([`(a)])([`(h)]). Põtee siis
|
\triangle f = f( |
a
|
+ |
h
|
) - f( |
a
|
) ╗ d f( |
a
|
)( |
h
|
), |
|
kun [`(h)] on "pieni".
Esimerkki 8
Funktion f(x, y) = x3y2 osittaisderivaatat ovat
|
D1 f = 3x2y2 ja D2 f = 2x3y. |
|
Kun [`(a)]
= (a1, a2) = (1, 2) ja [`(h)]
= (h1, h2) = (-0.04, 0.05)
on funktion f differentiaali
|
d f( |
a
|
)( |
h
|
) = D1 f(1, 2) ·(-0.04) + D2 f(1, 2) ·0.05 = ╝ = -0.28 |
|
ja
|
\triangle f = f(0.96, 2.05) - f(1, 2) = 0.963 ·2.05 - 4 ╗ -0.2819╝ |
|
Esimerkki 9
(Virhearviointi)
Pyritõõn mõõrõõmõõn maan vetovoiman kiihtyvyys (g) kokeellisesti, mittaamalla
putoamisaikaa t ja putoamismatkaa s.
|
s = |
1
2
|
gt2 Ì g = |
2s
t2
|
. |
|
Mittaustulokset s ja t eroavat jonkin verran todellisista arvoista s + h1,
s + h2. Tõll÷in g:n virhe
|
\triangle g = g(s + h1, t + h2) - g(s, t) ╗ d g(s, t)( |
h
|
) = |
Âg
Âs
|
h1 + |
Âg
Ât
|
h2 = |
2
t2
|
h1 - |
4s
t3
|
h2. |
|
Jos tiedetõõn mittaustarkkuudet eli | h1 | ú d (jokin vakio) ja
| h2 | ú t (my÷s jokin vakio), niin
|
|
Û
Û
|
dg(s, t)( |
h
|
) |
Û
Û
|
ú |
2
t2
|
d+ |
4| s |
t3
|
t. |
|
(Huomatus! Osittaisderivaatan jatkuvuudesta seuraa siis differentioituvuus, josta
taas seuraa osittaisderiviutuvuuden olemassaolo.)
3.4 Gradientti ja suunnatut derivaatat
Mõõritelmõ 1
Olkoon A ╠ ░ R2 ja f: A « R, differentioituva.
Tõll÷in funktion f gradientti on vektoriarvoinen funktio A « R2,
Merkitõõn
|
gradf = Ðf : = (D1 f, D2 f) = D1 f |
^
i
|
+ D2 f |
^
j
|
. |
|
Yleensõ, jos A ╠ ░ Rn, f : A « R niin mõõritellõõn
|
Ðf : = (D1 f, D2 f, ╝, Dn f). |
|
Põtee
|
df( |
a
|
)( |
h
|
) = D1 f (ya)h1 + D2 f( |
a
|
)h2 = |
µ
Þ
|
D1 f( |
a
|
), D2 f( |
a
|
) |
÷
°
|
·(h1, h2) = Ðf ( |
a
|
) · |
h
|
, |
|
missõ [`(h)]
= (h1, h2). My÷s avaruudessa Rn
|
df( |
a
|
)( |
h
|
) = Ðf( |
a
|
) · |
h
|
. |
|
Olkoon [`(a)] = (a1, a2) ╬ R2 siten, ettõ
| [`(a)] | = 1 = Í{a12 + a22}. Olkoon funktio f pisteen
[`(a)]
= (a1, a2) ympõrist÷ssõ mõõritelty reaaliarvoinen funktio.
Joukko
|
|
ý
Ý
¯
|
a
|
+ t |
a
|
|
Û
Û
|
t ╬ R |
³
²
■
|
|
|
on pisteen [`(a)] kautta kulkeva [`(a)]:n suuntainen suora.
Mõõritelmõ 2
Jos on olemassa raja-arvo
niin sitõ kutsutaan derivaataksi suuntaan [`(a)]
(pisteessõ [`(a)]), merkitõõn Â[`(a)] f([`(a)]).
Huomautus 3
Jos [`(a)] = (0, 1) = [^(j)],
niin Â[`(a)] f([`(a)]) = D2 f.
Huomautus 4
Mõõritelmõ 3.4.2 on sama Rn:ssõ.
Lause 5
Jos f on differentioituva pisteessõ [`(a)], niin Â[`(a)] f([`(a)])
on olemassa jokaiseen suuntaan [`(a)] ja
|
Â[`(a)] f( |
a
|
) = D1 f( |
a
|
) a1+ D2 f( |
a
|
) a2 + ╝+ Dn f( |
a
|
) an = Ðf( |
a
|
) · |
a
|
. |
|
Lause todistetaan my÷hemmin.
Esimerkki 6
Laske funktion
|
f(x, y, z) : = x4 + x3y + 2x2z |
|
derivaatta pisteessõ (1, 2, 5) vektorin (4, -2, 2) suuntaan.
Ratkaisu.
Lasketaan vektorin (4, -2, 2) = [`(v)] suuntainen yksikk÷vektori
|
|
a
|
= |
|
= |
(4, -2, 2)
|
= |
µ
Þ
|
2
Í6
|
, |
-1
Í6
|
, |
1
Í6
|
÷
°
|
. |
|
Osittaisderivaatat ovat
mistõ seuraa
|
|
| | |
| | |
(30, 1, 2) · |
µ
Þ
|
2
Í6
|
, - |
1
Í6
|
, |
1
Í6
|
÷
°
|
= |
61
Í6
|
. |
|
|
|
|
Lauseen 3.4.5 todistus:
Olkoon [`(a)] tarkastelupiste, jossa funktio f on differentioituva ja olkoon
[`(a)] ╬ Rn, | [`(a)] | = 1 ja t ╬ R.
Koska funktio f on differentioituva, niin
|
f( |
a
|
+ t |
a
|
) - f( |
a
|
) = D1 f( |
a
|
)ta1 + ╝+ Dn f( |
a
|
)tan+ | t | |
Û
Û
|
|
a
|
|
Û
Û
|
e(t |
a
|
). |
|
Siis erotusosamõõrõ
|
|
t
|
= D1 f( |
a
|
)a1 + ╝+ Dn f( |
a
|
)an+ |
| t |
t
|
e(t |
a
|
) |
|
|
«D1 f( |
a
|
)a1 + ╝+ Dn f( |
a
|
)an |
|
kun t « 0. Raja-arvo on siis olemassa, joten on olemassa suunnattu derivaatta, joka on
|
D1 f( |
a
|
)a1 + ╝+ Dn f( |
a
|
)an = Ðf( |
a
|
) · |
a
|
. [¯] |
|
Huomautus 7
Suunnatulle derivaatalle saadaan arvio
|
|
| | |
| | |
|
Û
Û
|
Ðf( |
a
|
) |
Û
Û
|
|
Û
Û
|
|
a
|
|
Û
Û
|
= |
Û
Û
|
Ðf( |
a
|
) |
Û
Û
|
|
|
| | |
|
µ
Í
|
|
(D1 f( |
a
|
)a1)2 + ╝+ (Dn f( |
a
|
)an)2 |
|
. |
|
|
|
|
Erityisesti, jos Ðf([`(a)]) = 0, niin
Â[`(a)] f([`(a)]) = 0 kaikkiin suuntiin
a. Jos Ðf([`(a)]) ╣ 0, niin voidaan kysyõ, mihin
suuntaan [`(a)] saadaan suurin derivaatta. Vastaus:
Kun [`(a)] ¡¡ Ðf([`(a)]) eli
silloin põtee
|
Â[`(a)] f( |
a
|
) = Ðf( |
a
|
) · |
a
|
= Ðf( |
a
|
) · |
|
= |
|
= |
Û
Û
|
Ðf( |
a
|
) |
Û
Û
|
. |
|
3.5 Yhdistettyjen kuvausten derivoiminen
Mõõritelmõ 1
Vektoriarvoista funktiota
|
g : = (g1, ╝, gn), g : Rm « Rn, gj : Rm « R
|
|
sanotaan differentioituvaksi pisteessõ [`(a)], jos jokainen komponenttifunktio
gj on differentioituva
pisteessõ [`(a)].
Lause 2
(Ketjusõõnt÷)
Olkoon g : Rm « Rn, g = (g1, ╝, gn) pisteessõ [`(a)]
differentioituva funktio ja f : U « R, g([`(a)]) ╬ U ╠ ░ Rn
pisteessõ g([`(a)]) differentioituva funktio. Tõll÷in f ░g on differentioituva
pisteessõ [`(a)] ja
|
Di (f ░g) = |
n
Õ
j = 1
|
|
µ
Þ
|
Dj f |
÷
°
|
|
µ
Þ
|
g( |
a
|
) |
÷
°
|
|
µ
Þ
|
Di gj |
÷
°
|
( |
a
|
), |
|
missõ i = 1, ╝, m.
Esimerkki 3
Olkoot funktiot f : R« R ja g : R« R. Nyt
|
D(f ░g)(a) = fó |
µ
Þ
|
g(a) |
÷
°
|
·g(a). |
|
Esimerkki 4
Olkoot m = 1, n = 2, f : R2 « R, g : R« R2,
f(x, y) = x2 + ey + exy ja g(t) = (t, 1 - t) = (g1(t), g2(t)).
Nyt
|
f ░g : R« R, f ░g(t) = t2 + e1 - t + et(1 - t) |
|
ja
|
D(f ░g)(t) = 2t - e1 - t + (1 - 2t)et - 2t. |
|
Lauseen 3.5.2 avulla:
joten
|
|
| | |
(D1 f) |
µ
Þ
|
g(t) |
÷
°
|
·(Dg1)(t) + (D2 f) |
µ
Þ
|
g(t) |
÷
°
|
·(Dg2)(t) |
|
| | |
|
µ
Þ
|
2t + (1 - t)et(1 - t) |
÷
°
|
·1 + |
µ
Þ
|
e1 - t + tet(1 - t) |
÷
°
|
·(-1) |
|
| | |
2t - e1 - t + (1 - 2t)et - 2t. |
|
|
|
|
Jos g (sisõfunktio) on yhden muuttujan funktio, niin f ░g on my÷s yhden muuttujan
funktio ja
|
D |
µ
Þ
|
f ░g |
÷
°
|
= |
n
Õ
j = 1
|
(Dj f) |
µ
Þ
|
g(t) |
÷
°
|
gó(t). |
|
Esimerkki 5
Oletetaan ettõ n = 1, n ╬ N ja funktio f on yhden muuttujan funktio,
g skalaariarvoinen funktio. Tõll÷in f ░g on m:n muuttujan funktio,
|
f ░g (x1, ╝, xm) = f |
µ
Þ
|
g(x1, ╝, xm) |
÷
°
|
|
|
ja
|
Di f ░g ( |
x
|
) = fó |
µ
Þ
|
g( |
x
|
) |
÷
°
|
·Di g( |
x
|
), i = 1, ╝, m, |
x
|
= (x1, ╝, xn) ╬ Rn. |
|
Esimerkki 6
Mõõritellõõn funktiot f ja g siten, ettõ
Nyt n = 1, m = 3 ja [`(x)]
= (x1, x2, x3) ╬ R3.
Yhdistetty kuvaus f ░g : R3 « R on
|
f ░g( |
x
|
) = (x1 - x2 + x32)2 + sin(x1 - x2 + x32). |
|
Lasketaan tõmõn osittaisderivaatat:
ja
|
D1 g( |
x
|
) = 1, D2 g( |
x
|
) = -1 ja D3 g( |
x
|
) = 2x3, |
|
joten
|
|
| | |
|
µ
Þ
|
2(x1 - x2 + x32) + cos(x1 - x2 + x32) |
÷
°
|
·1 |
|
| | |
-2(x1 - x2 + x32) - cos(x1 - x2 + x32) |
|
| | |
2x3 ·2(x1 - x2 + x32) + 2x3 cos(x1 - x2 + x32). |
|
|
|
|
Lauseen 3.5.2 todistuksen idea:
Valitaan [`(a)] ╬ Rm tarkastelupiste, [`(h)] ╬ Rm "pieni muutos".
|
(f ░g)( |
a
|
+ |
h
|
) - (f ░g)( |
a
|
) = f |
µ
Þ
|
g( |
a
|
+ |
h
|
) |
÷
°
|
- f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
= f |
µ
Þ
|
g( |
a
|
) + |
k
|
|
÷
°
|
- f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
, |
| (13) |
missõ [`(k)] = g([`(a)]+ [`(h)]) - g([`(a)]). Kaikilla
j = 1, ╝, n:
|
kj = gj( |
a
|
+ |
h
|
) - gj( |
a
|
). |
|
Koska gj on differentioituva
|
kj = D1 gj( |
a
|
)h1 + ╝+ Dn gj( |
a
|
)hm + |
Û
Û
|
|
h
|
|
Û
Û
|
ej ( |
h
|
) = |
m
Õ
i = 1
|
Di gj ( |
a
|
) hi + |
Û
Û
|
|
h
|
|
Û
Û
|
ej ( |
h
|
). |
| (14) |
Toisaalta my÷s f on differentioituva pisteessõ g([`(a)]), joten
|
|
|
f |
µ
Þ
|
g( |
a
|
) + |
k
|
|
÷
°
|
- f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
|
| | |
D1 f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
k1 + ╝+ Dn f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
kn + |
Û
Û
|
|
k
|
|
Û
Û
|
|
~
e
|
( |
k
|
) |
|
| | |
|
n
Õ
j = 1
|
(Dj f) |
µ
Þ
|
g( |
a
|
) |
÷
°
|
kj + |
Û
Û
|
|
k
|
|
Û
Û
|
|
~
e
|
( |
k
|
). |
|
|
|
| (15) |
Yhdistõmõllõ kaavat (13), (14) ja (15) saadaan
|
f ░g ( |
a
|
+ |
h
|
) - f ░g( |
a
|
) = |
m
Õ
i = 1
|
|
µ
Þ
|
|
n
Õ
j = 1
|
Dj f |
µ
Þ
|
g( |
a
|
) |
÷
°
|
Di gj ( |
a
|
) |
(*)
|
|
÷
°
|
hi + h. |
|
Pitkõhk÷ tarkastelu osoittaa, ettõ
h«[`0] riittõvõn nopeasti, kun [`(h)]« 0
(tarkemmin sanoen [(h([`(h)]))/(| [`(h)] |)] « 0 kun [`(h)]« 0).
Tõmõn jõlkeen Differentioituvuuden mõõritelmõstõ seuraa
Esimerkki 7
Olkoon f(x, y) = x2y - y3. Laske funktion t « f(2t3 - 5t, t4 + 3t + 7)
derivaatta, kun t = -2.
Ratkaisu.
Merkitõõn
|
h(t) = f(2t3 - 5t, t4 + 3t + 7) = f ░g(t), |
|
missõ
|
g(t) = (2t3 - 5t, t4 + 3t + 7) = : |
µ
Þ
|
g1(t), g2(t) |
÷
°
|
. |
|
Lauseesta 3.5.2 seuraa
|
hó(t) = D1 f |
µ
Þ
|
g(t) |
÷
°
|
gó1(t) + D2 f |
µ
Þ
|
g(t) |
÷
°
|
gó2(t). |
|
Nyt
Joten
|
hó(-2) = -36 ·19 + 9 ·(-29) = -945. |
|
Esimerkki 8
Olkoon f : R3 « R differentioituva ja h : R2 « R mõõritelty
kaavalla
|
h(x, y) = f(x2 - y2, xy2, 2y); x, y ╬ R. |
|
Laske D1h ja D2h funktion f derivaattojen avulla.
Ratkaisu. Põtee h = f ░g, missõ
|
g(x, y) = (x2 - y2, xy2, 2y). |
|
Ketjusõõnt÷: (h:n osittaisderivaatta x:n suhteen i = 1 ketjusõõnn÷ssõ)
|
|
| | |
D1 f |
µ
Þ
|
g(x, y) |
÷
°
|
D1 g1(x, y) + D2 f |
µ
Þ
|
g(x, y) |
÷
°
|
D1 g2(x, y) |
|
| | |
+ D3 f |
µ
Þ
|
g(x, y) |
÷
°
|
D1 g3(x, y) |
|
| | |
2x D1 f |
µ
Þ
|
g(x, y) |
÷
°
|
+ y2 D2 f |
µ
Þ
|
g(x, y) |
÷
°
|
. |
|
|
|
|
Vastaavalla laskulla kun i = 2
|
D2 h(x, y) = -2y D1 f |
µ
Þ
|
g(x, y) |
÷
°
|
+ 2xy D2 f |
µ
Þ
|
g(x, y) |
÷
°
|
+ 2 D3 f |
µ
Þ
|
g(x, y) |
÷
°
|
. |
|
4 Kõyrõt, tasa-arvopinnat ja tangenttitaso
Mõõritelmõ 9
Olkoon D ╠ R võli
(rajoitettu tai rajoittamaton) ja f : D« R2
jatkuva. Silloin joukko G: = f(D) on jatkuva
kõyrõ. Yhtõl÷pari
on kõyrõn G parametriesitys, t parametri.
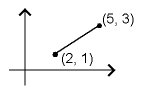
Esimerkki 10
Mõõritellõõn
Sillon G on jana, katso kuva 11.
Jos
niin G on jana, jonka põõtepisteet ovat (x1, y1) ja (x2, y2).
Esimerkki 11
Mõõritellõõn
Nyt G on ympyrõ jonka keskipiste on [`0] ja sõde 10.
Huomautus 12
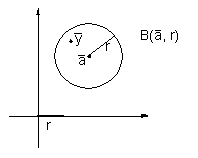
Sanotaan, ettõ G on rajoitettu, jos se sisõltyy johonkin kiekkoon
B(0, R) (jollekin R ╬ R+), muuten G on rajoittamaton.
Jos D on suljettu ja rajoitettu, niin f:n jatkuvuudesta seuraa, ettõ
G on rajoitettu. (Tõmõn asian todistus jõtetõõn võliin.)
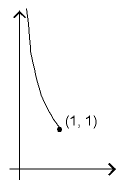
Esimerkki 13
Mõõritellõõn
Katso kuva 12.
|
|
Figure 12: kõyrõ f(t) : = (t, [ 1/(t)])
|
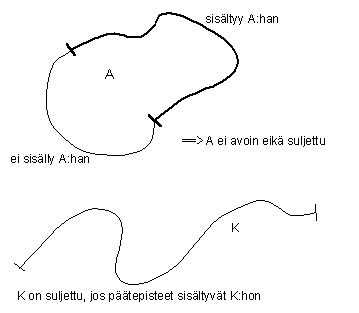
Olkoon D = [ a, b ]. Jos f(a) = f(b), niin kõyrõ on umpinainen.
Jos f on injektio, niin kõyrõõ G sanotaan kaareksi.
Olkoon t: = [ a, b] « [ a, b ] sellainen jatkuva surjektio,
ettõ t(a) = a ja t(b) = b. Silloin
missõ g : = f ░t. Sanotaan, ettõ kõyrõlle G on tehty parametrin vaihto.
Esimerkki 14
Mõõritellõõn
ja
|
t: [ 0, 1 ] « [ 0, 2p] t(s) = 2ps. |
|
Tõll÷in
ja
Parametrin vaihto on sallittu muulloinkin kuin suljetun võlin tapauksessa.
Vastaavasti mõõritellõõn avaruuskõyrõt: Jos
on jatkuva, niin kõyrõ G on joukko G = f(D). Edellõ mainitut termit kõyvõt my÷s
tõssõ.
Olkoon
Mõõritelmõ 15
Olkoon L pisteen f(s) kautta kulkeva
suora, suuntavektori [`(a)]. Tõll÷in L on G:n
tangentti pisteessõ f(s), jos pisteiden f(s) ja f(r) kautta kulkevan suoran
Lr suuntavektorille [`(b)](r) põtee:
Lause 16
Yllõ olevassa tilanteessa
(mikõli ainakin toinen komponenteista ╣ 0).
Todistus.
|
|
b
|
(r) ¡¡ |
µ
Þ
|
x(r) - x(s), y(r) - y(s) |
÷
°
|
Ì |
b
|
(r) ¡¡ |
µ
Þ
|
x(r) - x(s)
r - s
|
, |
y(r) - y(s)
r - s
|
÷
°
|
, |
|
ja viimeksi mainittu vektori lõhestyy vektoria
kun r « s.
[¯]
R3:ssa [`(x)] on pisteen [`(x)]0 kautta kulkevan suoran S piste jos ja vain jos
[`(x)]
= t[`(a)] + [`(x)]0, missõ [`(a)] ╣ 0 on suoran
suuntavektori.
Avaruuskõyrõn t « [`(x)](t) tangentti(suora) mõõritellõõn kuten
mõõritelmõssõ 4.0.15 ja pisteessõ [`(x)](s) tangentti on vektorin
|
|
µ
Þ
|
x1ó(s), x2ó(s), x3ó(s) |
÷
°
|
|
|
suuntainen.
Esimerkki 17
Olkoon t ╬ [ 1, 10 ] ja [`(x)](t) : = (t, t2, t3).
Kun t = 2, on tangentin suuntavektori
|
|
µ
Þ
|
x1ó(2), x2ó(2), x3ó(2) |
÷
°
|
= (1, 4, 12). |
|
Katso kuva 13.
|
|
Figure 13: Tangentin suuntavektori
|
Palataan tasokõyriin. Jatkuva kõyrõ esitetõõn usein muodossa
missõ piste (x, y) ╬ R2 kuuluu kõyrõlle ja funktio f on jossain
A ╠ R2 mõõritelty jatkuva funktio.
Esimerkki 18
Nollakeskeinen R-sõteinen ympyrõ tasossa:
a) x2 + y2 - R2 = 0
b) x(t) = R cost
y(t) = R sint, t ╬ [ 0, 2p].
Vastaavasti, jos f : A « R, A ╠ R2 jatkuva, niin joukko
|
|
ý
Ý
¯
|
(x, y) ╬ R2 |
Û
Û
|
f(x, y) = c |
³
²
■
|
|
|
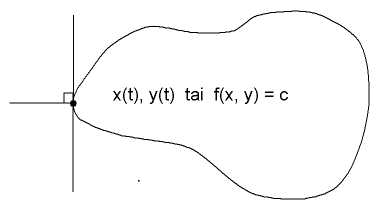
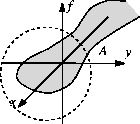
on kõyrõ, kun c ╬ R ja f toteuttaa tiettyjõ ehtoja. Nõitõ kõyriõ sanotaan
funktion f tasa-arvokõyriksi.
Osoitamme seuraavaksi, ettõ funktion f gradientti on kohtisuorassa tasa-arvokõyrõõ vastaan:
Oletetaan, ettõ c ╬ R on kiinteõ ja ettõ vastaavalla tasa-arvokõyrõllõ on parametriesitys
|
t « |
µ
Þ
|
x(t), y(t) |
÷
°
|
, t ╬ D. |
|
Oletetaan, ettõ x(t) ja y(t) ovat derivoituvia. Koska
|
f |
µ
Þ
|
x(t), y(t) |
÷
°
|
= c " t ╬ D, |
|
niin
|
|
| | |
| | |
(D1 f) |
µ
Þ
|
x(t), y(t) |
÷
°
|
xó(t) + (D2 f) |
µ
Þ
|
x(t), y(t) |
÷
°
|
yó(t) |
|
| | |
(Ðf) |
µ
Þ
|
x(t), y(t) |
÷
°
|
· |
µ
Þ
|
xó(t), yó(t) |
÷
°
|
. |
|
|
|
|
Nõin ollen tangenttivektori on kohtisuorassa funktion f gradientti vektoria vastaan
(jos xó(0) ╣ 0 tai yó(t) ╣ 0). Katso kuva 14.
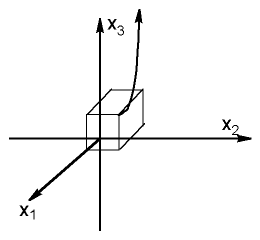
4.1 Pinnat
Mõõritelmõ 1
Avaruuden R3 suljettu osajoukko S on pinta, jos jokaisella [`(a)] ╬ S on
ympõrist÷ V joka on homeomorfinen neli÷n ] 0, 1 [ ×] 0, 1 [
(=: I2) kanssa. On olemassa jatkuva bijektio V « I2.
Tarkastellaan nyt pintoja, jotka voidaan esittõõ muodossa
|
S : = |
ý
Ý
¯
|
(x, y, z) |
Û
Û
|
f(x, y, z) = 0 |
³
²
■
|
, |
|
missõ f : A « R jatkuva, A ╠ R3.
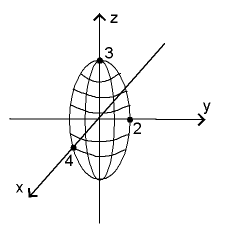
Esimerkki 2
Ellipsoidi
|
|
x2
42
|
+ |
y2
22
|
+ |
z2
32
|
- 1 |
=: f
|
= 0. |
|
Katso kuva 15.
Esimerkki 3
Jos g : B « R, B ╠ R2, niin yhtõl÷
mõõrittelee pinnan. Tõmõ voidaan nõet kirjoittaa muodossa
Pinta on nimeltõõn g:n kuvaaja.
4.2 Tangenttitasot
Olkoon S pinta
Olkoon (a, b, c) ╬ S pinnan piste. (Huom! f(a, b, c) = 0).
Tarkoituksemme on johtaa tõssõ pisteessõ olevan pinnan S tangenttitason yhtõl÷.
Tarkastellaan kõyrõõ G ╠ S, joka kulkee pisteen (a, b, c) kautta.
Oletetaan, ettõ G:lla on derivoituva parametriesitys
Olkoon t0 ╬ D sellainen piste, ettõ
|
|
µ
Þ
|
x(t0), y(t0), z(t0) |
÷
°
|
= (a, b, c). |
|
Koska G ╠ S, niin
|
f |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
= 0 " t ╬ D, |
|
ja tõstõ saadaan
|
|
| | |
|
|
d f |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
dt
|
|
|
| | |
(D1t) |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
xó(t) + (D2t) |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
yó(t) |
|
| | |
+ (D3t) |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
zó(t) |
|
| | |
(Ðf) |
µ
Þ
|
x(t), y(t), z(t) |
÷
°
|
· |
µ
Þ
|
xó(t), yó(t), zó(t) |
÷
°
|
. |
|
|
|
|
Kun t = t0, saadaan
|
(Ðf) (a, b, c) · |
µ
Þ
|
xó(t), yó(t), zó(t) |
÷
°
|
= 0 |
|
joten kaikkien yllõ mainittujen kõyrien tangentit ovat kohtisuorassa gradienttia
(Ðf) (a, b, c) vastaan.
Tangenttitason yhtõl÷
Merkitõõn
|
|
r
|
0
|
: = (a, b, c) = a |
i
|
+ b |
j
|
+ c |
k
|
. |
|
Olkoon [`(r)]
= (x, y, z) tangenttitason T piste. Siis
|
|
| | |
| | |
Ðf(a, b, c) ·( |
r
|
- |
r
|
0
|
) = 0 |
|
| | |
D1 f(a, b, c) (x - a) + D2 f(a, b, c) (y - b)+ D3 f(a, b, c) (z - c) = 0. |
|
|
|
|
Tõmõ on T:n yhtõl÷.
Esimerkki 1
Mõõritellõõn pinta
|
|
x2
42
|
+ |
y2
22
|
+ |
x2
32
|
- 1 = 0. |
|
Haluamme muodostaa tangenttitason yhtõl÷n pisteessõ
(a, b, c) = (2, 1, [ 3/(Í2)]).
T:n yhtõl÷
|
|
1
4
|
(x - 2) + |
1
2
|
(y - 1)+ |
Í2
3
|
|
µ
Þ
|
z - |
3
Í2
|
÷
°
|
= 0 |
|
eli
|
|
x
4
|
+ |
y
2
|
+ |
Í2
3
|
z -2 = 0. |
|
Esimerkki 2
Olkoon g : A « R, A ╬ R2, g differentioituva. Tarkastellaan pintaa
S, joka on funktion g kuvaaja,
|
S = { (x, y, z) |
Û
Û
|
|
g(x, y) - z
=: f(x, y, z)
|
= 0 } |
|
Nyt
|
(Ðf)(a, b, c) = |
µ
Þ
|
(D1 g)(a, b), (D2 g)(a, b), -1 |
÷
°
|
. |
|
Pisteen ( a, b, g(a, b) ) kautta kulkevan tangenttitason yhtõl÷ on nõin ollen
|
D1 g(a, b) (x - a) + D2 g(a, b)(b - y) = z - c. |
|
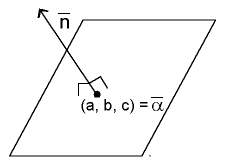
Tason T yhtõl÷ R3:ssa yleisesti
T:n mõõrõõ:
- annettu piste [`(a)], joka kuuluu tasoon
- normaalivektori [`(n)], joka on kohtisuorassa jokaista tasossa
T kulkevaa suoraa vastaan.
Oletetaan ettõ nõmõ annettu: Olkoon [`(x)] ╬ R3 mielivaltainen tason T
piste. Silloin [`(x)] toteuttaa yhtõl÷n:
eli
|
x1 n1 + x2 n2 + x3 n3 - |
╬ R
|
= 0. |
|
Yleisesti siis tason yhtõl÷ on muotoa
missõ A, B, C, D ╬ R.
Esimerkki 3
Mõõritellõõn [`(a)] = (2, 2, 1) ja [`(n)]
= [`(k)]
= (0, 0, 1).
Nyt n1 = n2 = 0, [`(a)] ·[`(n)]
= 1. Yhtõl÷:
(Piste (x, y, z) kuuluu tasoon, jos ja vain jos z = 1).
Suoran yhtõl÷ R3:ssa
Pisteen [`(a)] kautta kulkevan, vektorin [`(b)]
suuntaisen suoran L yhtõl÷ on
Toisin sanoen, [`(x)] ╬ L jos ja vain jos on olemassa luku t siten, ettõ
(16) toteutuu.
Voidaan kirjoittaa my÷s muodossa
|
|
x1 - a1
c1
|
= |
x2 - a2
c2
|
= |
x3 - a3
c3
|
|
|
jollekin cj ╬ R.
5 Võliarvolause
Lause 4
Olkoon A ╠ ░ R2 ja f : A « R differentioituva, ja
olkoot [`(a)], [`(b)] ╬ A sellaisia pisteitõ, ettõ niiden yhdysjana sisõltyy A:han.
Tõll÷in on olemassa q ╬ [ 0, 1 ], jolle
|
f( |
b
|
) - f( |
a
|
) = Ðf |
µ
Þ
|
|
a
|
+ q( |
b
|
- |
a
|
) |
÷
°
|
·( |
b
|
- |
a
|
). |
| (17) |
Huomautus 5
1) Lause 5.0.4 põtee, kun R2 muutetaan Rn:ksi.
2) Jos merkitõõn [`(b)]- [`(a)]
= [`(h)], niin (17) põtee jos ja vain jos
|
f( |
a
|
- |
h
|
) - f( |
a
|
) = Ðf( |
a
|
+ q |
h
|
) · |
h
|
. |
|
Lauseen 5.0.4 todistus:
Todistus.
Olkoon pisteiden [`(a)] ja [`(b)] yhdysjana
|
J = { |
a
|
+ th |
Û
Û
|
0 ú t ú 1 }. |
|
Mõõritellõõn derivoituva funktio g : [ 0, 1 ] « R,
|
g(t) = f( |
a
|
+ t |
h
|
) |
µ
Þ
|
=f( |
a
|
+ t( |
b
|
- |
a
|
) |
÷
°
|
. |
|
Ketjusõõnn÷n mukaan
|
gó(t) = D1f( |
a
|
+ t |
h
|
)h1 + D2( |
a
|
+ t |
h
|
)h2 = Ðf( |
a
|
+ t |
h
|
) · |
h
|
. |
|
Toisaalta võliarvolauseesta seuraa, ettõ on olemassa q ╬ ] 0, 1 [, jolle
|
g(1) - g(0) = gó(q)(1 - 0) = gó(q). |
|
Saamme
|
f( |
a
|
+ |
h
|
) - f( |
a
|
) = g(1) - g(0) = gó(q) = Ðf( |
a
|
+ q |
h
|
) · |
h
|
. |
|
[¯]
Esimerkki 6
Jos | Ðf([`(a)]) | ú M tarkastelualueessa (ainakin janalla J), missõ
M on jokin positiivinen vakio, niin
|
|
| | |
|
Û
Û
|
Ðf( |
a
|
+ q( |
b
|
- |
a
|
) ) ·( |
b
|
- |
a
|
) |
Û
Û
|
|
|
| | |
|
Û
Û
|
Ðf(a + q( |
b
|
- |
a
|
) ) |
Û
Û
|
|
Û
Û
|
|
b
|
- |
a
|
|
Û
Û
|
|
|
| | |
|
|
|
Kaavaa voidaan soveltaa fysiikan virhearvioinneissa: [`(b)] on jokin mitattu suure,
[`(a)] sen tarkka arvo, | [`(b)]- [`(a)] | mittausvirhe (josta on jonkinlainen kõsitys olemassa).
Lauseke f([`(a)]) on etsitty suure, ja edellõ mainitun kaavan mukaan M| [`(b)]- [`(a)] | on
ylõraja arvio virheelle, joka tehdõõn, kun f([`(a)]):n likiarvo f([`(b)]) lasketaan mittaustuloksen
[`(b)] perusteella.
5.1 Implisiittifunktiolause
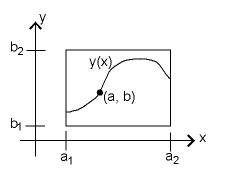
Lause 1
Olkoon A ╠ ░ R2 ja f: A « R jatkuvasti derivoituva. Olkoon (a, b)
piste, joka on f:n nollakohta, f(a, b) = 0. Oletetaan, ettõ D2 f(a, b) ╣ 0.
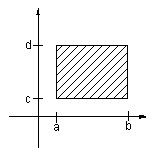
Tõll÷in on olemassa sellainen suorakulmio
|
D = { (x, y) |
Û
Û
|
a1 < x < a2, b1 < y < b2 } ╠ R2, |
|
(a, b) ╬ D, ettõ jokaista x ╬ ] a1, a2 [ kohti yhtõl÷llõ
on yksikõsitteinen ratkaisu y(x) ╬ ] b1, b2 [. Funktio x « y(x)
on jakuvasti derivoituva võlillõ ] a1, a2 [.
Huomautus. Siis funktio x « y(x) toteuttaa
f(x, y(x)) = 0, " x ╬ ] a1, a2 [. Katso kuva 17.
Esimerkki 2
Funktion
|
f(x, y) = y5 + xy - 4 = 0 |
|
ratkaisupisteet tasossa: Katso kuva 18.
|
|
Figure 18: Ratkaisupisteet
|
Yhtõl÷n koko ratkaisu ei ole minkõõn yhden muuttujan funktion kuvaaja!
Lauseen 5.1.1 todistus.
Todistus.
Oletetaan ettõ D2 f(a, b) > 0. Koska D2f on jatkuva, tõstõ seuraa ettõ on olemassa
r > 0 siten, ettõ D2 f(x, y) > 0, kun
(x, y) ╬ B([`(a)], r) (tõssõ [`(a)] : = (a, b)).
Tarkastellaan funktioita y « f(a, y); yllõ olevan nojalla se on aidosti kasvava
b:n n-ympõrist÷ssõ. Olkoon
b1, b2 ╬ R sellaisia, ettõ
|
b - |
r
2
|
< b1 < b < b2 < b + |
r
2
|
. |
|
Tõll÷in
|
f(a, b1) < 0 = f(a, b) < f(a, b2). |
|
Koska f jatkuva, niin on olemassa sellaiset luvut a1, a2,
|
a - |
r
2
|
< a1 < a < a2 < a + |
r
2
|
, |
|
ettõ
|
f(x, b1) < 0, f(x, b2) > 0, |
|
kun a1 < x < a2.
Olkoon x ╬ ] a1, a2 [. Nyt põtee
1. f(x, b1) < 0, f(x, b2) > 0
2. j: y « f(x, y) on jatkuva võlillõ ] b1, b2 [
3. j: y « f(x, y) on aidosti kasvava.
Tõstõ seuraa, ettõ on olemassa y = y(x) ╬ ] b1, b2 [, jolle
j(y(x)) = 0 eli f(x, y(x)) = 0. Todistus sille, ettõ y(x) on derivoituva,
sivuutetaan.
[¯]
Olkoon f: A « R, A ╠ ░ R2, f(a, b) = 0 ja D2 f(a, b) ╣ 0.
Implisiittifunktiolauseesta siis seuraa, ettõ yhtõl÷llõ f(x, y) = 0 on yksikõsitteinen
ratkaisu y(x) jokaista
x ╬ ] a1, a2 [ kohti. Funktio x « y(x) on jatkuvasti derivoituva.
Derivaatan yó(x) laskeminen:
Põtee f(x, y(x) ) = 0, joten
|
0 = |
d
dx
|
f(x, y(x) ) = D1 f(x, y(x) ) ·1 +(D2 f)(x, y(x)) ·yó(x) |
|
mistõ seuraa
|
yó(x) = |
-D1 f(a, b)
D2 f(a, b)
|
. |
|
Esimerkki 3
Tarkastellaan yhtõl÷õ
Tõllõ on ratkaisu x = y = 0. Osoitetaan, ettõ kyseessõ oleva yhtõl÷ mõõrittelee y:n
x:n funktiona jossakin pisteen nolla ympõrist÷ssõ ja lasketaan yó(0).
Ratkaisu.
Põtee f(0, 0) = 0 (Lause 5.1.1 kun a = 0, b = 0) ja
D2 f(x, y) = x - cos(x + y), D2 f(0, 0) = -1 ╣ 0.
Lause 5.1.1 soveltuu, joten yhtõl÷ (18)
mõõritte÷ee y:n x:n funktiona.
|
yó(0) = |
D1 f(0, 0)
D2 f(0, 0)
|
= |
-1
1
|
= -1. |
|
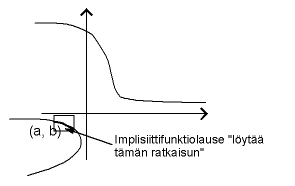
ja
Tapaus, jossa implisiittilause EI toimi:
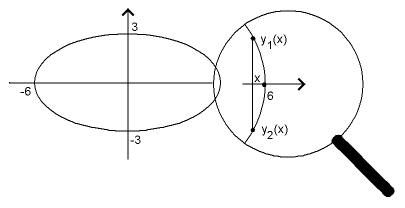
Tarkastellaan yhtõl÷õ
pisteessõ (x, y) = (6, 0). Nyt
|
D2 f(x, y) = 2y, D2 f(6, 0) = 0, |
|
joten implisiittifunktiolauseen oletukset eivõt ole voimassa.
Huomautus 4
Yhtõl÷n (19) ratkaisupisteet muodostavat ellipsin tasoon.
Katso kuva 19. Eli y ei ole yksikõsitteinen x:n funktio.
Lause 5
Olkoon A ╠ ░ Rn + 1 ja f: A « R jatkuvasti derivoituva funktio,
jolle pisteessõ ([`(a)], b) ╬ A ╠ Rn + 1
|
f( |
a
|
, b) = 0, Dn + 1 ( |
a
|
, b) ╣ 0. |
|
Tõll÷in on olemassa [`(a)]:n ympõrist÷ B([`(a)], r) ╠ Rn ja avoin võli
] b1, b2 [ ' b siten, ettõ jokaisella [`(x)] ╬ B([`(a)], r) yhtõl÷llõ
f([`(x)], y) = 0 on yksikõsitteinen ratkaisu y([`(x)]) ╬ ] b1, b2 [.
Derivaatoille põtee:
|
Di y( |
x
|
) = - |
|
i = 1, ╝, n. |
|
Lausetta 5.1.5 voidaan kõyttõõ, kun halutaan varmistaa, ettõ yhtõl÷n
f(x, y, z) = 0 ratkaisut muodostavat pinnan R3:ssa (vertaa luku 4).
Esimerkki 6
Yhtõl÷
|
f(x, y, z) = zex2 + y2 + z2 = 0 |
|
mõõrittelee z:n muuttujien x ja y funktiona erõõssõ (0, 0, 0):n
ympõrist÷ssõ, sillõ
eli yhtõl÷ toteutuu. Nyt
|
|
| | |
ex2 + y2 + z2 + z ·2zex2 + y2 + z2 |
|
| | |
| | |
|
|
|
Siis voidaan ratkaista z = z(x, y), kun (x, y) on pisteen (0, 0) jossain
ympõrist÷ssõ. Derivaatalle saadaan
|
|
Âz
Âx
|
(0, 0) = D1 z(0, 0) = - |
D1 f(0, 0, 0)
D3 f(0, 0, 0)
|
= - |
0
1
|
= 0. |
|
6 ─õriarvojen teoriaa
Tutkitaan aluksi neli÷muotoja kahden muuttujan x, y tapauksessa:
|
P(x, y) = ax2 + 2bxy + cx2, |
| (20) |
missõ a, b, c ╬ R annettuja kertoimia.
Esimerkki 7
Mõõritellõõn
|
P(x, y) = 2x2 - 10xy + 3y2. |
|
Nõhdõõn ettõ P(0, 0) = 0
- Jos P(x, y) ╣ 0 aina, kun (x, y) ╣ (0, 0), niin P on definiitti.
a) Jos P(x, y) > 0 aina, kun (x, y) = (0, 0), niin P on
positiivisesti definiitti.
b) Jos P(x, y) < 0 aina, kun (x, y) = (0, 0), niin P on
negatiivisesti definiitti.
- Jos P(x, y) │ 0 " (x, y) ╬ R2 tai jos
P(x, y) ú 0 " (x, y) ╬ R2, niin P on semidefiniitti.
(Huomautus! Jos P on definiitti, on se my÷s semidefiniitti.)
- Jos P saa positiivisia ja negatiivisia arvoja, se on indefiniitti.
Yleisemmin, neli÷muoto Rn:ssõ on muotoa
|
P( |
x
|
) = |
x
|
T
|
A |
x
|
= |
n
Õ
i = 1
|
aiixi2 + |
Õ
1 ú i < j ú n
|
2aijxi xj, |
|
missõ A on n ×n matriisi (aij)i, j = 1n.
Lause 8
Neli÷muoto (20) on
Definiitti, jos ac - b2 > 0,
semidefiniitti, jos ac - b2 = 0,
indefiniitti, jos ac - b2 < 0.
Merkitõõn D : = ac - b2.
Todistus.
Oletetaan, ettõ D > 0. Silloin a ╣ 0 ja P(x, y) voidaan kirjoittaa muodossa
|
P(x, y) = |
1
a
|
[ (ax + by)2 + Dy2 ]. |
|
Jos P(x, y) = 0, niin
|
0 = aP(x, y) = (ax + by)2 + Dy2. |
|
Tõmõ on mahdollista vain jos Dy2 = 0 ja (ax + by)2 = 0 eli
y = 0 ja (ax + 0)2 = 0 eli y = 0 ja x = 0 (koska a ╣ 0).
Oletetaan nyt D < 0 ja a ╣ 0. Tõll÷in
|
P(x, y) = |
1
a
|
|
µ
Þ
|
(ax + by)2 + Dy2 |
÷
°
|
= |
1
a
|
|
µ
Þ
|
(ax + by) - |
Í
|
| D |
|
y |
÷
°
|
|
µ
Þ
|
(ax + by) + |
Í
|
| D |
|
y |
÷
°
|
. |
|
Nõhdõõn, ettõ P hõviõõ xy-tason suorilla
|
ax + (b - |
Í
|
| D |
|
)y = 0 ja ax + (b + |
Í
|
| D |
|
)y = 0. |
|
Siis P on indefiniitti.
Tapaus a = 0, D < 0. Tõll÷in
Koska D = ac - b2 < 0 ja a = 0, niin tõytyy olla b ╣ 0.
Otetaan y = 1:
joka saa negatiivisia ja positiivisia arvoja kun x ╬ R. P on siis indefiniitti.
Tapaus D = 0.
- Jos a ╣ 0, niin P(x, y) = [ 1/(a)](ax + by)2,
- Jos a = 0, niin P(x, y) = cy2 Ì b = 0.
Selvõstikin P on semidefiniitti.
[¯]
Esimerkki 9
Mõõritellõõn
|
P(x, y) = x2 - 6xy + 2y2. |
|
Nyt a = 1, b = -3, c = 2 ja D = 2 - 9 = -7, eli P on indefiniitti.
P(x, y) hõviõõ suorilla
Esimerkiksi
Esimerkki 10
Mõõritellõõn
|
P(x, y) = 4xy - 4x2 - y2. |
|
Nyt a = -4, b = 2, c = -1 ja D = 4 - 4 = 0 (semidefiniitti).
Itseasiassa P(x, y) = -(2x - y)2, mistõ nõhdõõn
(i) P(x, y) ú 0 " (x, y) ╬ R2
(ii) P(50, 100) = -(100 - 100)2 = 0.
Esimerkki 11
Mõõritellõõn
|
P(x, y) = 2xy - 3x2 - y2. |
|
Nyt a = -3, b = 1, c = -1 ja D = 2 > 0 (definiitti).
Esimerkiksi
P(1, 1) = -2 < 0.
Siis P(x, y) < 0, kun (x, y) ╣ [`0].
6.1 Taylorin kaava
Olkoon A ╠ ░ R2, f : A « R funktio, jolla on kaikkien kertalukujen jatkuvat
osittaisderivaatat. Olkoon [`(x)] ╬ A tarkastelupiste ja [`(h)] ╬ R2 siten, ettõ
jana
|
J : = { |
x
|
+ t |
h
|
|
Û
Û
|
t ╬ [ 0, 1 ] } ╠ A. |
|
J on jana, jonka põõtepisteet ovat [`(x)] ja [`(x)]+ [`(h)]. Mõõritellõõn
Tarkastellaan funktiota
joka on mielivaltaisen monta kertaa derivoituva yhden muuttujan funktio.
Ketjusõõnn÷n mukaan
|
(f ░g)ó = (D1 f) ░g ·g1ó+ (D2 f) ░g2ó = h1 (D1 f) ░g + h2 (D2 h) ░g. |
|
Huomautus 1
|
g(t) = |
µ
Þ
|
g1(t), g2(t) |
÷
°
|
= (x1 + th1, x2 + th2), |
|
missõ [`(x)]
= (x1, x2), [`(h)]
= (h1, h2) ja g1ó = h1, g2ó = h2.
Edelleen
|
|
| | |
h1 |
d
dt
|
(D1 f ░g) + h2 |
d
dt
|
(D2 f ░g) |
|
| | |
h1 |
µ
Þ
|
h1 (D11 f) ░g + h2 (D12 f) ░g |
÷
°
|
+ h2 |
µ
Þ
|
h1 (D21 f) ░g + h2 (D22 f) ░g |
÷
°
|
|
|
| | |
h12 (D11 f) ░g + 2h1 h2 (D12 f) ░g + h22 (D22 f) ░g |
|
| | |
|
µ
Þ
|
(h1D1 + h2D2)2 f |
÷
°
|
░g, |
|
|
|
|
missõ D12 = D11, D1D2 = D12 = D2D1 ja D22 = D22.
Induktiolla voidaan todistaa kaava
|
(f ░g)(k) = |
µ
Þ
|
(n1 D1 + h2 D2)k f |
÷
°
|
░g. |
|
Taylorin kaavasta yhden muuttujan funktiolle F : B « R, missõ
[ 0, 1 ] ╠ B ╠ ░ R, saadaan
|
F(1) = |
n - 1
Õ
k = 0
|
|
1
k!
|
F(k)(0) + |
1
n!
|
F(n)(q), |
| (21) |
missõ q ╬ ] 0, 1 [ (jos n = 1, tõmõ on võliarvolause).
Jos F toteuttaa tietyt (ankarat) vaatimukset, sille põtee kehitelmõ
|
F(x) = |
Ñ
Õ
k = 0
|
|
1
k!
|
F(k)(0)xk, |
|
missõ x ╬ B(0, r).
Taylorin kehitelmõ (21) põtee funktiolle F, jos se on n kertaa jatkuvasti derivoituva.
Sovelletaan tõtõ, kun F : = f ░g:
|
(f ░g)(1) = |
n - 1
Õ
k = 0
|
|
(f ░g)(k)(0)
k!
|
+ |
(f ░g)(n)(q)
n!
|
. |
|
Sijoittamalla k:nen derivaatan lauseke ja ottamalla huomioon
|
g(0) = |
x
|
, g(1) = |
x
|
+ |
h
|
, g(q) = |
x
|
+ q |
h
|
, |
|
saadaan
|
|
| | |
| | |
|
n - 1
Õ
k = 0
|
|
1
k!
|
(h1D1 + h2D2)k f( |
x
|
) + |
1
n!
|
(h1D1 + h2D2)n f( |
x
|
+ q |
h
|
), |
|
|
|
|
missõ q ╬ ] 0, 1 [. Tõmõ kehitelmõ põtee, kun f on n kertaa
jatkuvasti derivoituva. Arvolla n = 2 kehitelmõstõ seuraa
Lause 2
Olkoon f: A « R, A ╠ ░ R2, kaksi kertaa jatkuvasti derivoituva.
Olkoon [`(x)] ╬ A, [`(h)] ╬ R2 ja [`(h)] ╬ B([`0], r), missõ
r on niin pieni, etõ
[`(x)]+ B([`0], r) ╠ A. Tõll÷in
|
|
| | |
| | |
+ |
1
2
|
|
µ
Þ
|
h12 D11 f( |
x
|
) + 2h1h2 D12 f( |
x
|
) + h22 D22 f( |
x
|
) |
÷
°
|
|
|
| | |
|
|
|
missõ e([`(h)]) « 0, kun [`(h)]«[`0].
6.2 ─õriarvoista
Olkoon f: A « R, A ╠ ░ Rm, m ╬ N.
Tõll÷in
- funktiolla f on (lokaali)maksimi pisteessõ a ╬ A, jos
on olemassa sellainen r > 0, ettõ f([`(x)]) ú f([`(a)]), kun [`(x)] ╬ B([`(a)], r)
- funktiolla f on (lokaali)minimi pisteessõ a ╬ A, jos
on olemassa sellainen r > 0, ettõ f([`(x)]) │ f([`(a)]), kun [`(x)] ╬ B([`(a)], r)
- õõriarvo on minimi tai maksimi
- õõriarvopiste on lõht÷joukon piste, jossa õõriarvo saavutetaan
- õõriarvo on oleellinen, jos f([`(x)]) ╣ f([`(a)]), kun
[`(x)] ╬ B([`(a)], r) \{[`(a)]} (tõssõ r kuten maksimin tai minimin mõõritrelmõssõ).
Lause 1
Olkoon f: A « R, A ╠ ░ Rm, kerran derivoituva. Jos [`(a)] ╬ A on
f:n õõriarvopiste, niin Di f([`(a)]) = 0, kun i = 1, ╝, m.
Esimerkki 2
Mõõritellõõn
Nyt
Tunnetusti f:llõ on lokaali minimi pisteessõ [`0].
Esimerkki 3
Mõõritellõõn
Nyt põtee D1 f(0, 0) = 0 = D2 f(0, 0). Toisaalta (0, 0) ei
ole õõriarvopiste:
Lauseen 6.2.1 todistus:
Todistus.
Tehdõõn antiteesi:
Oletetaan ettõ [`(a)] ╬ A on A:n õõripiste ja Dk f([`(a)]) ╣ 0, jollekin
k ╬ {1, ╝, m}. Mõõritellõõn funktio
|
g(x) = f(a1, ╝, ak - 1, x, ak + 1, ╝, am) |
| (22) |
missõ x ╬ B(ak, r) ╠ R jollakin r > 0.
Nyt
|
|
dg
dx
|
(ak) = Dk f( |
a
|
) ╣ 0. |
|
Nõin ollen g saa ak:n ympõrist÷ssõ sekõ suurempia ettõ pienempiõ
arvoja kuin g(ak). Kohdan 22 nojalla sama põtee funktiolle f,
joten [`(a)] ei ole funktion f õõriarvopiste.
[¯]
Lause 4
Olkoon A ╠ ░ R2, f: A « R. Oletetaan ettõ funktiolla f on jatkuvat
kertaluvun 1. ja 2. osittaisderivaatat. Jos pisteessõ [`(a)] ╬ A põtee
|
D1 f( |
a
|
) = 0 = D2 f( |
a
|
) |
|
ja
|
D : = D11f( |
a
|
) D22f( |
a
|
) - D12( |
a
|
)2 > 0, |
| (23) |
niin [`(a)] on oleellinen õõriarvopiste;
- maksimi, jos D11 < 0
- minimi, jos D11 > 0.
Mõõritelmõ 5
Satulapiste. Olkoon A, [`(a)], f kuten lauseen 6.4 oletuksessa.
|
D1 f( |
a
|
) = D2 f( |
a
|
) = 0. |
|
Jos f saa [`(a)]:n mielivaltaisessa ympõrist÷ssõ sekõ suurempia ettõ
pienempiõ arvoja kuin f([`(a)]), niin [`(a)] on satulapiste.
Esimerkki 6
Mõõritellõõn
Derivaatat ovat
joten
Pisteessõ [`(a)]
= (0, 0)
|
D11 f( |
a
|
) D22 f( |
a
|
) - D12 f( |
a
|
)2 < 0. |
|
Esimerkki 7
Mõõritellõõn
|
f(x, y) = x2 + xy + y2 + x - y. |
|
Tehtõvõnõ on etsiõ õõriarvo- ja satulapisteet.
Ratkaisu. Osittaisderivaatat
Jos (x, y) on kriittinen piste (eli derivaattojen nollakohta), niin
Pisteessõ (-1, 1) põtee
eli kyseessõ on õõriarvopiste (minimi).
Esimerkki 8
Mõõritellõõn
Derivaatat ovat
Kriittiset pisteet ovat
|
|
| | |
| | |
(x, y) = (0, 0) tai (x, y) = (1, -1). |
|
|
|
|
Edelleen
|
D11 f = 6x, D22 f = -6y, D12 f = 3, |
|
joten
|
|
| | |
-9 < 0 (satulapiste eli ei õõriarvopiste) |
|
| | |
6 ·1 ·(-6) ·(-1) - 9 = 36 - 9 > 0 (minimi.) |
|
|
|
|
Lauseen 6.2.4 todistuksesta:
Olkoon [`(h)] ╬ B(0, r), r > 0. Lauseen 6.1.2 mukaan
põtee
|
|
| | |
| | |
+ |
1
2
|
|
µ
Þ
|
D11 f( |
a
|
)h12 + 2D12 f( |
a
|
)h1h2 |
|
| | |
+ D22 f( |
a
|
)h22 |
÷
°
|
+ |
Û
Û
|
|
h
|
|
Û
Û
|
e( |
h
|
), |
|
|
|
|
missõ e([`(h)]) « 0, kun [`(h)]« 0.
Koska [`(h)] on pieni ja D1f([`(a)]) = D2f([`(a)]) = 0, mõõrõõ lauseke
|
D11 f( |
a
|
)h12 + 2D12 f( |
a
|
)h1h2 + D22 f( |
a
|
)h22 |
| (24) |
erotuksen f([`(a)]+ [`(h)]) - f([`(a)]) etumerkin. Lauseke (24) on neli÷muoto
P(h1, h2), kertoimet a = D11 f([`(a)]), b = D12 f([`(a)]), c = D22 f([`(a)]).
Yllõolevista mõõritelmistõ seuraa, ettõ [`(a)] on õõriarvopiste jos ja vain jos
neli÷muoto P on definiitti. Huomaa, ettõ
Yllõ olevat tarkastelut olivat lokaaleja.
Esimerkki 9
Funktion suurin tai pienin arvo joukossa B ╠ R2. Olkoon B kompakti (eli
rajoitettu ja suljettu). Nyt põtee: Jos f: B « R on jatkuva, niin f saa B:ssõ
suurimman ja pienimmõn arvon. Esimerkiksi jos C : = [ 0, Ñ[, niin funktio
f(x) = [ 1/(x)] ei saa joukossa C pienintõ arvoaan. Mutta C ei olekaan
kompakti joukko.
Huomautus 10
Se, ettõ funktio f: B « R saa pienimmõn arvonsa pisteessõ [`(x)]0 ╬ B, tarkoittaa, ettõ
|
f( |
y
|
) │ f( |
x
|
0
|
) " y ╬ B. |
|
Olkoon B kompakti, f: B « R jatkuva ja kaksi kertaa jatkuvasti derivoituva.
Ainoat pisteet, joissa f voi saada suurimman tai pienimmõn arvonsa ovat
- f:n lokaalit õõriarvopisteet
- B:n reunapisteet.
Yllõ esitettyõ lokaalien õõriarvojen tarkastelua voidaan siten kõyttõõ hyvõksi my÷s
globaalien õõriarvojen eli suurimman ja pienimmõn arvon l÷ytõmiseksi. Lopuksi, ilman
todistuksia esitetõõn n:n muuttujan funktioiden õõriarvojen teoriaa.
Lause 11
Olkoon n ╬ N, n │ 2, A ╠ ░ Rn, f: A « R derivoituva.
Jos funktiolla f on õõriarvo pisteessõ [`(a)] ╬ A, niin
|
Ðf( |
a
|
) = 0 eli D1 f( |
a
|
) = D2 f( |
a
|
) = ╝ = Dn f( |
a
|
) = 0. |
|
Todistus.
Sama kuin n = 2.
[¯]
Lause 12
Olkoon A ╠ ░ Rn, f kaksi kertaa jatkuvasti derivoituva ja
|
Ðf( |
a
|
) = 0 pisteessõ |
a
|
╬ A. |
|
Muodostetaan funktion f Hessen matriisi
|
H = |
µ
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
Þ
|
|
÷
¸
¸
¸
¸
¸
¸
¸
¸
¸
¸
°
|
|
|
ja diagonalisoidaan se; saadaan muotoa
oleva matriisi. Seuraavat tulokset põtevõt:
a) Jos kaikki ominaisarvot ovat suurempia kuin nolla, on [`(a)] minimi.
b) Jos kaikki ominaisarvot ovat pienempiõ kuin nolla, on [`(a)] maksimi
c) Jos matriisilla on sekõ positivisia ettõ negatiivisia ominaisarvoja, niin
[`(a)] ei ole õõriarvopiste.
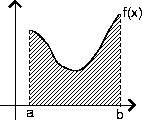
7 Kõyrõintegraalit
Olkoon f: [ a, b ] « R jatkuva. Sen integraalifunktiota F : [ a, b ] « R
merkitõõn
ja sille põtee kaava [(dF)/(dx)] = f. Geometrinen tulkinta:
Kuvan 20 võritetyn alueen pinta-ala on ‗ab f(x) dx.
Olkoon j: [ a, b ] « R2 (tai Rn) jatkuva. Joukko
j([ a, b ]) ╠ R2 on kõyrõ, jota merkitõõn esimerkiksi G.
Kuvaus j on G:n parametriesitys.
Jos kõyrõllõ on parametriesitys, joka on injektio, sitõ sanotaan kaareksi.
Valitsemalla
toinen põõtepiste alkupisteeksi ja toinen loppupisteeksi, saadaan
suunnistettu kaari.
Kaari on sõõnn÷llinen, jos sillõ on jatkuvasti derivoituva parametriesitys.
Mõõritelmõ 13
Olkoon G ╠ R2 sõõnn÷llinen suunnistettu kaari ja olkoon
j = (j1, j2) jatkuvasti derivoituva parametriesitys (siis G = j([ a, b ])).
Jos f: G« R ja g: G« R ovat jatkuvia, niin mõõritellõõn
|
|
¾
§
G
|
f dx + g dy : = |
b
¾
§
a
|
|
µ
Þ
|
f(j(t)) j1ó(t) +g(j(t)) j2ó(t) |
÷
°
|
dt. |
|
Yleisesti:
|
G ╠ Rn, g: [ a, b ] « Rn, g([ a, b ]) = G, g = (g1, ╝, gn) |
|
jatkuvasti derivoituva. Olkoon fj : G« R, j = 1, 2, ╝, n. Mõõritellõõn
|
|
¾
§
G
|
f1 dx1 + f2 dx2 + ╝+ fn dxn: = |
b
¾
§
a
|
|
µ
Þ
|
f1(g(t))g1ó+ ╝+ fn(g(t))gnó(t) |
÷
°
|
dt |
|
Merkitõõn my÷s
|
|
¾
§
G
|
f1 dx1 + f2 dx2 + ╝+ fn dxn: = |
¾
§
G
|
|
f
|
·d |
r
|
, |
|
missõ [`]f : = (f1, ╝, fn) ja d[`(r)] : = (dx1, ╝, dxn).
Lause 14
Mõõritelmõn 7.0.13 kõyrõintegraali ei riipu G:n
parametriesityksestõ.
Todistus.
Sivuutetaan.
[¯]
Esimerkki 15
Laske
kun G on yksikk÷ympyrõn kaari pisteestõ (1, 0) pisteeseen (0, 1).
Ratkaisu. Kõytetõõn G:lle tuttua parametrisointia
Tõll÷in
ja
|
|
¾
§
G
|
x2 dx + xy dy = |
p/2
¾
§
0
|
|
µ
Þ
|
cos2 t ·(-sint) + cost sint cost |
÷
°
|
dt = 0. |
|
Toinen mahdollisuus on kõyttõõ G:lle parametriesitystõ
Tõll÷in j: [ -1, 0 ] « R2 ja
|
j(t) = |
µ
Þ
|
j1(t), j2(t) |
÷
°
|
= (-t, |
Í
|
1 - t2
|
). |
|
Huomaa, ettõ
|
|
Í
|
x(t)2 + y(t)2
|
= |
Í
|
t2 + (1 - t2)
|
= 1. |
|
Tõllõ parametriesityksellõ
|
|
¾
§
G
|
x2 dx + xy dy = |
0
¾
§
-1
|
|
µ
þ
Þ
|
t2 ·(-1) + (-t) |
Í
|
1 - t2
|
· |
-t
|
÷
¸
°
|
dt = |
0
¾
§
-1
|
(-t2 + t2) dt = 0, |
|
sillõ j1ó(t) = -1 ja
|
j2ó(t) = |
1
2
|
(1 - t)-[ 1/2] ·(-2t) = |
-t
|
|
|
Kõyrõintegraalin kõsite liittyy lõheisesti fysiikkaan.
Esimerkki 16
Tarkastellaan massapistettõ, joka liikkuu pitkin R3:n kõyrõõ G.
Kappaleeseen vaikuttaa voima
|
|
F
|
(x, y, z) = F1(x, y, z) |
i
|
+ F2(x, y, z) |
j
|
+ F3(x, y, z) |
k
|
|
|
missõ
[`(F)] : R3 « R3, [`(F)] = (F1, F2, F3).
Ratkaisu.
Massapisteen sijainti ajan t funktiona (aikavõli on a ú t ú b) on
|
|
r
|
(t) = (x(t), y(t), z(t)) = x(t) |
i
|
+ y(t) |
j
|
+ z(t) |
k
|
, |
|
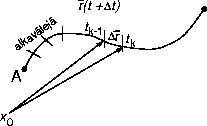
katso kuva 21.
|
|
Figure 21: Massapisteen sijainti
|
Kun aika muuttuu (võhõn) hetkestõ t hetkeen t + Dt, massapisteen
paikan muutos on
|
|
| | |
|
r
|
(t + Dt) - |
r
|
(t) = |
µ
Þ
|
x(t + Dt) - x(t), y(t + Dt) - y(t), z(t + Dt) - z(t) |
÷
°
|
|
|
| | |
|
µ
Þ
|
xó(t) Dt, yó(t) Dt, xó(t) Dt |
÷
°
|
= Dt ró(t). |
|
|
|
|
Tõllõ võlillõ tehty ty÷ on
|
DW @ |
F
|
( |
r
|
(t)) ·D |
r
|
= |
F
|
( |
r
|
(t)) ·ró(t) Dt. |
|
Halutaan laskea ty÷, joka tehdõõn, kun massapiste siirtyy pisteestõ A pisteeseen B.
Jaetaan aikavõli [ a, b ] osavõleihin [ tk - 1, tk ], k = 1, ╝, n.
Ty÷ksi osavõlillõ [ tk - 1, tk ] saadaan
|
DW @ |
F
|
( |
r
|
(tk - 1)) ·ró(tk - 1)(tk - tk - 1). |
|
Koko ty÷ on
|
DW @ |
n
Õ
k = 1
|
|
F
|
( |
r
|
(tk - 1)) ·ró(tk - 1)(tk - tk - 1) |
|
joka suppenee aikajaon tihentyessõ kohti integraalia
|
|
b
¾
§
a
|
|
F
|
( |
r
|
(t)) · |
r
|
ó(t) dt. |
|
Tõssõ
|
|
|
|
b
¾
§
a
|
|
F
|
( |
r
|
(t)) · |
r
|
ó(t) dt |
| | |
|
b
¾
§
a
|
|
µ
Þ
|
F1(r(t))r1ó(t) + F2(r(t))r2ó(t) + F3(r(t))r3ó(t) |
÷
°
|
dt |
|
| | |
|
¾
§
G
|
F1 dx + F2 dy + F3 dz, |
|
|
|
|
eli tehty ty÷ on edellõmainitun kõyrõintegraalin arvo.
Kõyrõintegraalit voidaan mõõritellõ helposti my÷s yleisemmille integroimisteille.
Olkoot Gi ja Gk suunnistettuja sõõnn÷llisiõ kaaria siten, ettõ
Gi:n loppupiste on Gi + 1:n alkupiste. Silloin Gi:t muodostavat
paloittain sõõnn÷llisen tien G. (G = ╚i = 1k Gi.)
Mõõritellõõn
|
|
¾
§
G
|
f1 dx1 + ╝+ fn dxn: = |
n
Õ
i = 1
|
|
¾
§
Gi
|
f1 dx1 + ╝+ fn dxn. |
|
Esimerkki 17
Tutkitaan integraalia
a) G on jana jonka alkupiste on (1, 0, 0) ja loppupiste (0, 1, 1).
G:n parametrisointi:
|
j(t) = (1 - t)(1, 0, 0) + t(0, 1, 1) = (1 - t, t , t) = : (j1, j2, j3), t ╬ [ 0, 1 ]. |
|
Nyt
|
j1ó(t) = -1, j2ó(t) = 1 = j3ó(t) |
|
joten
|
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
j2(t) j1ó(t) - j1(t) j2ó(t) + j3ó(t) |
÷
°
|
dt |
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
t ·(-1) - (1 - t) ·1 + 1 |
÷
°
|
dt |
|
| | |
|
t
¾
§
0
|
-t - 1 + t + 1 dt = 0. |
|
|
|
|
b) G on ruuviviiva
|
G = |
ý
Ý
¯
|
(cost, sint, |
2
p
|
t) |
Û
Û
|
t ╬ |
Ú
Ù
|
0, |
p
2
|
¨
¹
|
³
²
■
|
, |
|
Nyt
joten
|
|
| | |
|
p/2
¾
§
0
|
|
µ
Þ
|
j2(t) j1ó(t) + j1(t) j2ó(t) + j3ó(t) |
÷
°
|
dt |
|
| | |
|
p/2
¾
§
0
|
|
µ
Þ
|
-sin2 t - cos2 t + |
2
p
|
|
÷
°
|
dt |
|
| | |
|
p/2
¾
§
0
|
(-1+ |
2
p
|
) dt = - |
2
p
|
+ 1 ╣ 0. |
|
|
|
|
7.1 Vektorikentõn potentiaali
Joukko A ╠ Rn on alue, jos se on avoin ja yhtenõinen. (Joukko on yhtenõinen, jos sitõ
ei voi esittõõ kahden epõtyhjõn avoimen, erillisen joukon yhdisteenõ).
Mõõritelmõ 1
Olkoon A ╠ ░ R2 alue ja f : A « R2, f = (f1, f2) vektorikenttõ. Jos on
olemassa differioituva funktio u : A « R (skalaariarvoinen!) siten, ettõ
Ðu = f (eli f1 = D1u, f2 = D2u) niin u on funktion f potentiaali.
Sanotaan my÷s, ettõ lauseke
on eksakti ja u on sen integraalifunktio.
Huomautus 2
Kaikilla vektorikentillõ ei ole olemassa potentiaalia.
Huomautus 3
Potentiaali on yksikõsitteinen lisõttõvõõ vakiota vaille:
Jos u on funktion f potentiaali, niin v : A « R on funktion f potentiaali
jos ja vain jos on olemassa vakio c ╬ R siten, ettõ v = u + c.
Esimerkki 4
Olkoon
|
f(x, y) = (3x2y + cos(x + y), x3 + cos(x + y)), f : R2 « R2. |
|
Tõll÷in
|
u(x, y) = x3y + sin(x + y), |
|
ja põtee Ðu = f.
Esimerkki 5
Olkoon
|
f(x, y) = (10x2, cosx + ey). |
|
Tõllõ ei ole potentiaalifunktiota. Tõhõn tapaukseen palaamme my÷hemmin.
Edellõ oleva Mõõritelmõ 7.1.1 toimii my÷s avaruudessa Rn:
Olkoon f : A « Rn, missõ A ╠ Rn on alue. Tõll÷in u : A « R
on funktion f potentiaali, jos Ðu = f.
Esimerkki 6
Olkoon
|
f(x, y, z) = |
µ
Þ
|
x
r3
|
, |
y
r3
|
, |
z
r3
|
÷
°
|
, f : R3 \{ |
0
|
} « R3, |
|
missõ
|
|
| | |
(x, y, z) = x |
i
|
+ y |
j
|
+ z |
k
|
, |
|
| | |
|
Û
Û
|
|
r
|
|
Û
Û
|
= |
Í
|
x2 + y2 + z2
|
. |
|
|
|
|
Voidaan kirjoittaa f(x, y, z) = [([`(r)])/(r3)]. Tõllõ on potentiaali
u(x, y, z) = -[ 1/(r)], sillõ
|
D1 u = |
Â
Âx
|
(-(x2 + y2 + z2)-[ 1/2]) = |
1
2
|
(x2 + y2 + z2)-[ 3/2] ·2x = |
x
r3
|
= f1 jne. |
|
Lause 7
Olkoon f : A « Rn jatkuva vektorikenttõ, A ╠ ░ Rn alue ja
f = (f1, ╝, fn). Olkoon u : A « R funktion f potentiaali.
Jos [`(a)] = (a1, ╝, an) ╬ A, [`(b)] = (b1, ╝, bn) ╬ A
ja G ╠ A paloittain sõõnn÷llinen tie alkupisteenõ [`(a)]
ja loppupisteenõ [`(b)], niin
|
|
¾
§
G
|
f1 dx1 + ╝+ fn dxn = u( |
b
|
) - u( |
a
|
). |
|
Katso kuva 22.
Todistus.
Oletetaan aluksi, ettõ G on sõõnn÷llinen kaari, toisin sanoen, on olemassa
jatkuvasti derivoituva parametriesitys
|
j = (j1, ╝, jn), j: [ a, b] « Rn. |
|
Ketjusõõnn÷stõ seuraa, ettõ
|
(u ░j)ó(t) = |
n
Õ
i = 1
|
(Di u)(j(t)) jió(t) = |
n
Õ
i = 1
|
fi (j(t)) jió(t), t ╬ [ a, b] ╠ R. |
|
Kõyrõintegraalin mõõritelmõstõ seuraa
|
|
| | |
|
b
¾
§
a
|
[ f1(j(t))j1ó(t) + ╝+ fn(j(t))jnó(t) ] dt |
|
| | |
|
b
¾
§
a
|
(u ░j)ó(t) dt = [ u ░j]t = ab |
|
| | |
u(j(b)) - u(j(a)) = u( |
b
|
) - u( |
a
|
). |
|
|
|
|
[¯]
Jos G on sõõnn÷llinen tie, jaetaan tarkastelu sõõnn÷llisiin osakaariin.
Esimerkki 8
Laske
|
|
¾
§
G
|
|
yz dx + xz dy + xy dz
(*)
|
, |
|
kun G on ruuviviiva,
Alkupiste on (1, 0, 0) ja loppupiste (1, 0, 2p).
Ratkaisu. Mõõritellõõn u(x, y, z) = xyz. Tõll÷in
|
Ðu(x, y, z) = (yz, xz, xy). |
|
Siten (*) on eksakti funktio ja Lauseen 7.1.7 nojalla
|
|
¾
§
G
|
yz dx + xz dy + xy dz = u(1, 0, 2p) - u(1, 0, 0) = 1 ·0 ·2p- 1 ·0 ·0 = 0. |
|
Lause 9
Olkoon A ╠ ░ R2 ympyrõ (kiekko), f : A « R2 jatkuvasti derivoituva ja
f = (f1, f2). Tõll÷in funktiolla f on potentiaali jos ja vain jos
|
D1 f2 = D2 f1 (integroituvuus ehto). |
|
Huomautus 10
Lause 7.1.9 ei põde kaikilla alueille A;
se voidaan kyllõ yleistõõ
niin sanotuille yhdesti yhtenõisille alueille. Katso kuva 23.
|
| |  |  |
| Yhdesti yhtenõinen | Yhtenõisiõ, mutta eivõt yhdesti yhtenõisiõ
|
|
Figure 23: Yhdesti yhtenõisyys
Lauseen 7.1.9 todistus.
Võite: Funktiolla f on potentiaali jos ja vain jos D2 f1 = D1 f2.
Todistus.
1. Oletetaan, ettõ funktiolla f on potentiaali u, eli
Derivointijõrjestys on vaihdannainen, joten
2. Oletetaan, ettõ D2 f1 = D1 f2. Merkitõõn pisteellõ (a, b) alueen
A keskipistettõ. Olkoon nyt (x, y) ╬ A mielivaltainen piste. Mõõritellõõn
|
u(x, y) : = |
y
¾
§
b
|
f2 (a1, x2) dx2 + |
x
¾
§
a
|
f1(x1, y) dx1 |
µ
Þ
|
= |
¾
§
G
|
f1 dx1 + f2 dx2 |
÷
°
|
. |
|
Lasketaan
|
D1 u(x, y) = |
= 0
|
+ D1 |
x
¾
§
a
|
f1(x1, y) dx1 = f1(x, y), |
|
ja
|
|
| | |
D2 |
y
¾
§
b
|
f2(a, x2) dx2 + D2 |
x
¾
§
a
|
f1(x1, y) dx1 |
|
| | |
f2(a, y) + |
x
¾
§
a
|
D2 f1(x1, y) dx1 |
|
| | |
f2(a, y) + |
x
¾
§
a
|
D1 f2(x1, y) dx1 |
|
| | |
f2(a, y) + [ f2(x1, y) ]x1 = ax |
|
| | |
f2(a, y) + f2(x, y) - f2(a, y) |
|
| | |
|
|
|
Perustelu sille, ettõ tõssõ voidaan derivoida integraalimerkin alla, sivuutetaan.
[¯]
Esimerkki 11
Laske
|
|
¾
§
G
|
|
2x(1 - ey)
(1 + x2)2
|
dx + |
ey
1 + x2
|
dy, |
|
kun
|
G = |
ý
Ý
¯
|
(x, y) |
Û
Û
|
x = cost, y = sint, t ╬ |
Ú
Ù
|
0, |
p
2
|
¨
¹
|
³
²
■
|
. |
|
Ratkaisu.
Tien alkupiste on (1, 0) ja loppupiste (0, 1).
Merkitõõn
Tõll÷in
|
|
| | |
D2 |
Ú
Ù
|
2x
(1 + x2)2
|
- |
2xey
(1 + x2)2
|
¨
¹
|
= - |
2x
(1 + x2)2
|
ey |
|
| | |
D1 |
ey
1 + x2
|
= - |
ey ·2x
(1 + x2)2
|
, |
|
|
|
|
eli D2 f1 = D1 f2.
(Yhtõl÷ D2 f1 = D1 f2 põtee koko tasossa R2, esimerkiksi joukossa B(0, 106).)
Siten vektorikentõllõ f : = (f1, f2) on potentiaali u ja Lauseen 7.1.7
mukaan
|
u(0, 1) - u(1, 0) = |
¾
§
G
|
f1 dx + f2 dy. |
|
Tõmõ voidaan tulkita my÷s niin, ettõ integraalin arvo ei riipu integroimistiestõ.
Valitsemme uuden integroimistien [(G)\tilde] siten, ettõ kuljetaan
pisteestõ (0, 1) pisteeseen (1, 0) koordinaattiakselien suuntaisia janoja
pitkin origon kautta.
Lasketaan
|
|
¾
§
[(G)\tilde]
|
f1 dx + f2 dy = |
¾
§
G1
|
f1 dx + f2 dy + |
¾
§
G2
|
f1 dx + f2 dy |
|
Tõssõ G1 : j(t) = (1 - t, 0), t ╬ [ 0, 1 ] ja j1ó = -1, j2ó = 0,
joten
|
|
¾
§
G1
|
f2 dy = 0 ja f1(x, 0) = |
2x(1 - e0)
(1 + x2)2
|
= 0. |
|
Siten
G2:n parametriesitys: j(t) = (0, t), t ╬ [ 0, 1 ] ja j1ó = 0, j2ó = 1.
|
|
¾
§
G2
|
╝ = |
1
¾
§
0
|
|
et
1 + 0
|
j2ó(t) dt = |
1
¾
§
0
|
et dt = e - 1. |
|
Vastaus on siis -1.
Esimerkki 12
Lause 7.1.9 ei põde kaikille alueille A!
Olkoon
|
f(x, y) = |
µ
Þ
|
-y
x2 + y2
|
, |
x
x2 + y2
|
÷
°
|
, f: A « R2, A = R2 \{0, 0}. |
|
Edelleen
|
|
| | |
|
-(x2 + y2) + 2y2
(x2 + y2)2
|
= |
y2 - x2
(x2 + y2)2
|
|
|
| | |
|
x2 + y2 - 2x2
(x2 + y2)2
|
= |
y2 - x2
(x2 + y2)2
|
|
|
|
|
|
siten D2 f1 = D1 f2 joukossa A. Tarkastellaan integraalia
kun
|
G = { (x, y) |
Û
Û
|
x = cost, y = sint; t ╬ [ 0, 2p] } |
|
(eli G on yksikk÷ympyrõn reuna).
Jos funktiolla f on potentiaali u koko tasossa R2, niin Lauseen 7.1.7 nojalla
|
|
¾
§
| f1 dx + f2 dy = u( |
b
|
) - u( |
a
|
) = 0, |
|
koska G:n loppupiste [`(b)] ja G:n alkupiste [`(a)] ovat sama (1, 0).
Lasketaan kõyrõintegraali suoraan:
|
j(t) = (cost, sint), j1ó = -sint, j2ó = cost. |
|
Nõin ollen
|
|
| | |
|
2p
¾
§
0
|
|
Ú
Ù
|
-sint
1
|
(-sint) + |
cost
1
|
·cost |
¨
¹
|
dt |
|
| | |
|
2p
¾
§
0
|
[ sin2 t + cos2 t ] dt |
|
| | |
|
|
|
Lause 7.1.9 ei nõin ollen voi põteõ.
Huomautus 13
Jos G on suljettu (umpinainen) integroimistie (alku- ja loppupiste samat),
niin
(f kuten edellõ) on "2p kertaa G:n kierrosluku nollan suhteen".
Lause 14
Olkoon A ympyrõ, f: A « R jatkuva. Funktiolla f on potentiaali
u : A « R, jos ja vain jos
|
|
¾
§
G
|
f1 dx + f2 dy = 0, (py÷rteett÷myys) |
|
kun G on mielivaltainen umpinainen paloittain sõõnn÷llinen tie.
Potentiaalin laskeminen
Olkoon f : A « R2 vektorikenttõ, jolla on potentiaali u : A « R.
Lauseesta 7.1.7 seuraa
|
u(x, y) = -u(a, b) + |
¾
§
G
|
f1 dx1 + f2 dx2, |
|
missõ (a, b) ╬ A on kiinteõ ja G ╠ A on paloittain
sõõnn÷llinen tie, alkupisteenõ (a, b) ja loppupisteenõ (x, y).
Jos esimerkiksi valitaan G:ksi murtoviiva (a, b) « (a, y) « (x, y)
sekõ u(a, b) = 0, saadaan u:n arvo pisteessõ (x, y) kaavasta
|
u(x, y) = |
y
¾
§
b
|
f2(a, x2) dx2 + |
x
¾
§
a
|
f1(x1,y) dx1. |
|
Vaihtoehtoisesti, jos G on murtoviiva (a, b) « (x, b) « (x, y), saadaan
|
u(x, y) = |
x
¾
§
a
|
f1(x1, b) dx1 + |
y
¾
§
b
|
f2(x, x2) dx2. |
|
Katso kuva 24.
Esimerkki 15
Laske vektorikentõn
potentiaali.
Ratkaisu. 1) Tarkastellaan, onko potentiaalia: Põtee
|
D1 f2(x, y) = 20x4 y3 = D2 f1(x, y), "(x, y) ╬ R2, |
|
joten potentiaali u on olemassa koko tasossa.
2) Valitaan u(0, 0) = 0 ja G: (0, 0) « (x, 0) « (x, y).
Saadaan
|
|
| | |
|
x
¾
§
0
|
f1(x1, 0) dx1 + |
y
¾
§
0
|
f2(x, x2) dx2 |
|
| | |
|
x
¾
§
0
|
5x14 ·0 dx1 + |
y
¾
§
0
|
(4x5 x23 + 1) dx2 |
|
| | |
0 + [ x5 x24 + x2 ]x2 = 0y = x5 y4 + y. |
|
|
|
|
Tarkistus:
|
Ðu(x, y) = (5x4 y4, 4x5 y3 + 1). |
|
Potentiaalin laskeminen avaruudessa Rn
Olkoon A ╠ Rn avoin yhtenõinen, f : A « Rn vektorikenttõ. Funktio
u : A « R on potentiaali, jos
|
Ðu = f eli Dj u = fj, " j = 1, ╝, n. |
|
Lauseen 7.1.9 integroituvuusehto avaruudessa Rn:
|
Di fj = Dj fi, " i, j = 1, ╝, n, i ╣ j. |
|
Esimerkki 16
Olkoon
|
f(x, y, z) = |
µ
Þ
|
y - sin(x + z), x, -sin(x + z) |
÷
°
|
. |
|
Integroituvuus ehdot
toteutuvat, joten
|
u(x, y, z) = xy + cos(x + z). |
|
Tapauksessa n = 3 merkitõõn
|
|
| | |
|
Û
Û
Û
Û
Û
Û
|
|
Û
Û
Û
Û
Û
Û
|
= |
i
|
|
Û
Û
Û
|
|
Û
Û
Û
|
+ |
j
|
|
Û
Û
Û
|
|
Û
Û
Û
|
+ |
k
|
|
Û
Û
Û
|
|
Û
Û
Û
|
|
|
| | |
(D2 f3 - D3 f2) |
i
|
+ (D1 f3 - D3 f1) |
j
|
+ (D1 f2 - D2 f1) |
k
|
. |
|
|
|
|
Integroituvuusehto põtee jos ja vain jos Ð×f = [`0]
alueessa A.
Sanomme, ettõ vektorikenttõ f on py÷rteet÷n, jos
|
|
¾
§
G
|
f1 dx1 + ╝+ fn dxn = 0 |
|
jokaiselle umpinaiselle G.
7.2 Integrointi kaaren pituuden suhteen
Olkoon G ╠ R2 sõõnn÷llinen kaari,
j = (j1, j2) : [ a, b ] « R kaaren G jatkuvasti
derivoituva parametriesitys. Kaaren G pituus on
|
L = |
b
¾
§
a
|
|
Í
|
j1ó(t)2 + j2ó(t)2
|
dt. |
|
Katso kuva 25.
Võliõ [ a, t ] vastaava kaaren pituus
|
s = l(t) = |
t
¾
§
a
|
|
Í
|
j1ó(t)2 + j2ó(t)2
|
dt. |
|
Funktio on l: [ a, b ] « [ 0, L ] jatkuvasti derivoituva
bijektio, koska
|
ló(t) = |
Í
|
j1ó(t)2 + j2ó(t)2
|
> 0. |
|
l(t) on kaaren pituus pisteestõ j(a) pisteeseen j(t) ja
l on aidosti kasvava.
Mõõritellõõn y: = (y1, y2) : [ 0, L ] « R2,
y(s) = j░l-1(s). Funktion y on mittatarkka parametrisaatio
polulle G, katso kuva 26.
|
|
Figure 26: Parametrisaatio polulle G
|
Olkoon f : G« R jatkuva. Mõõritellõõn funktion f integraali kaaren
pituuden suhteen
|
|
¾
§
G
|
f ds : = |
L
¾
§
0
|
f(y(s)) ds. |
|
Laskujen helpottamiseksi suoritetaan muuttujan vaihto:
|
|
| | |
l(t) = |
t
¾
§
a
|
|
Í
|
j1ó(t)2 + j2ó(t)2
|
dt, |
|
| | |
|
d
dt
|
|
t
¾
§
0
|
|
Í
|
j1ó(t)2 + j2ó(t)2
|
: = |
Í
|
j1ó(t)2 + j2ó(t)2
|
. |
|
|
|
|
Saadaan
|
|
¾
§
G
|
f ds = |
L
¾
§
0
|
f(y(s)) ds = |
b
¾
§
a
|
f(j(t)) |
Í
|
j1ó(t)2 + j2ó(t)2
|
dt. |
|
Integraalin geometrinen tulkinta: se on funktion f kuvaajan ja x-y-tasossa olevan
kõyrõn G võliin jõõvõn liuskan pinta-ala.
Katso kuva 27.
Avaruudessa R3:
|
|
¾
§
G
|
f ds = |
b
¾
§
a
|
f(y(s)) ds = |
b
¾
§
a
|
f(j(t)) |
Í
|
j1ó(t)2 + ╝+ jnó(t)2
|
dt, |
|
missõ j: [ a, b ] « Rn, on G:n parametriesitys.
Esimerkki 1
(Katso kuva 28.)
Jos kaarella G on massa, jonka tiheys r(x, y), niin
painopisteen koordinaatit ovat:
Esimerkki 2
Oletetaan, ettõ r on vakio=:r ja G on puoliympyrõ
|
{ (x, y) |
Û
Û
|
x2 + y2 = 1, y │ 0 }. |
|
Reunalla G on parametriesitys
Lasketaan
|
|
¾
§
G
|
r(x, y) ds = |
p
¾
§
0
|
r0 |
Í
|
sin2(t) + cos2(t)
|
dt = r0p |
|
ja
|
|
| | |
|
p
¾
§
0
|
r0 j1(t) |
Í
|
j1ó(t)2 + j2ó(t)2
|
dt = |
p
¾
§
0
|
r0 cost dt = 0 |
|
| | |
|
|
|
eli
|
X = |
0
pr0
|
= 0, Y = |
2r0
pr0
|
= |
2
p
|
. |
|
8 Pintaintegraalit
Olkoon R ╠ R2 suljettu suorakulmio
|
[ a, b ] ×[ c, d ] = { (x, y) |
Û
Û
|
a ú x ú b, c ú y ú d }, |
|
ja a, b, c, d ╬ Z. Olkoon n ╬ N ja Dn joukko tason suljettuja
neli÷itõ:
|
Dn = |
ý
Ý
¯
|
[ k ·2-n, (k + 1)2-n ]×[ l2-n, (l + 1)2-n ] |
Û
Û
|
k, l ╬ Z |
³
²
■
|
. |
|
Merkitõõn
|
Qn,k,l = [ k2-n, (k + 1)2-n ] ×[ l2-n, (l + 1)2-n ] |
|
╚k, l ╬ Z Qn, k, l = R2. Katso kuvat 29 ja 30.
Olkoon f : R« R jokin funktio. Haluamme mõõritellõ sen integraalin yli joukon R.
Merkitõõn
|
Gn, k, l = |
sup
| { f(x, y) |
Û
Û
|
(x, y) ╬ Qn, k, l } |
|
ja
|
gn, k, l = |
inf
| { f(x, y) |
Û
Û
|
(x, y) ╬ Qn, k, l } |
|
(mõõrittely: jos Qn, k, l \not ╠ R Ì Gn, k, l gn, k, l = 0).
Mõõritellõõn lukua n vastaavat ylõ- ja alasummat:
Huom! 2-2n on Qn, k, l:n pohjan pinta-ala, joten esimerkiksi luku Gn, k, l ·2-2n
on kuvassa 30 olevan sõrmi÷n tilavuus. Luku gn, k, l ·2-2n on hieman pienemmõn
sõrmi÷n tilavuus; luku Mn on siten (hieman liian suuri) approksimaatio funktion f
mõõrõõmõn pinnan ja x-y-tason suorakulmion R võliin jõõvõn kappaleen tilavuudelle.
Mõõritelmõ 3
Jos limn « Ñ Mn ja limn « Ñ mn ovat olemassa ja
|
|
lim
n « Ñ
|
Mn = |
lim
n « Ñ
|
mn, |
|
niin sanotaan, ettõ f on integroituva joukossa R ja kyseinen raja-arvo on
funktion f pintaintegraali yli suorakulmion R, merkitõõn
|
|
¾
§
R
|
f, |
¾
§
R
|
|
¾
§
|
f(x, y) dxdy, |
b
¾
§
a
|
|
d
¾
§
c
|
f(x, y) dxdy. |
|
Huomautus 4
Voidaan osoittaa, ettõ
jos f : R « R on jatkuva, se on aina integroituva.
Olkoon A ╠ R2 rajoitettu, f : A « R. Mõõritellõõn
funktio f koko joukossa R kaavalla
|
f(x, y) : = 0, kun (x, y) ¤ A. |
|
Merkitõõn fA:lla funktion f jatketta.
Valitaan suorakulmio R (reunat kokonaislukujen kohdalla kuten edellõ) siten,
ettõ A ╠ R.
Mõõritellõõn
mõõritelmõ ei riipu suorakulmion R valinnasta. Katso kuva 31.
Jos A ei ole rajoitettu, voidaan mõõritellõ
|
|
¾
§
A
|
f = |
lim
m « Ñ
|
|
¾
§
A ÃB(0, m)
|
f, |
|
mikõli kyseinen raja-arvo on olemassa. Katso kuva 32.
Olkoon A ╠ R2 rajoitettu. Mõõritellõõn joukon A karakteristinen funktio kaavalla
Mõõritelmõ 5
A on mitallinen, jos XA on integroituva A:ssa.
Katso kuva 33.
Huomautus 6
Itse asiassa
|
|
¾
§
A
|
XA = A:n óópinta-alaóó. |
|
‗A XA = A:n pintamitta =: m(A). Jos m(A) = 0, niin sanotaan,
ettõ A on nollamittainen.
Lause 7
Jos joukon A reuna on nollamitallinen, niin A on mitallinen.
Lause 8
Jos kaari on sõõnn÷llinen tai muotoa
|
{ (x, y) |
Û
Û
|
x ╬ [ a, b ], y = y(x) }, |
|
missõ y: [ a, b ] « R on jatkuva, niin se on nollamittainen.
Huomautus 9
Nollamittaisten joukkojen õõrellinen yhdiste on nollamittainen.
Kochin lumihiutalekõyrõ (katso kuva 34) on esimerkki monimutkaisesta tason
osajoukosta, ns. fraktaalista. Fraktaalireunaiset joukot eivõt yleensõ ole
mitallisia edellõ esitetyssõ mielessõ, eikõ niiden yli voida integroida tõllõ
tekniikalla.
|
|
Figure 34: Kochin lumihiutalekõyrõ
|
Lause 10
Jos funktiot f1, ╝, fm ovat integroituvia A:ssa ja
l1, ╝, lm ╬ R, niin funktio
on integroituva A:ssa, ja
|
|
¾
§
A
|
l1f1 + ╝+ lmfm = l1 |
¾
§
A
|
f1 + ╝+ lm |
¾
§
A
|
fm. |
|
Lause 11
Olkoon A ╠ R2, m(d(A)) = 0. Olkoon f : A « R sellainen funktio, ettõ
f on jatkuva lukuunottamatta mahdollisesti jotain A:n nollamittaista osajoukkoa B.
Silloin f on integroituva A:ssa.
Esimerkki 12
Olkoon A = B((3,4), 100) ja
Tõmõ ei ole jatkuva x-akselilla (=L), mutta L ÃA on nollamittainen(jana).
Lause 13
Olkoon A joukko, joka on jaettu osiin Ai, i = 1, ╝, n, missõ
m(d(Ai)) = 0. Funktio f on integroituva joukossa A jos ja vain jos
f on integroituva jokaisessa joukossa Ai. Tõll÷in
|
|
¾
§
A
|
f = |
¾
§
A1
|
f + ╝+ |
¾
§
An
|
f = |
n
Õ
i = 1
|
|
¾
§
Ai
|
f. |
|
Lause 14
Oletetaan ettõ f on integroituva joukossa
|
R = { (x, y) |
Û
Û
|
a ú x ú b, c ú y ú d }, |
|
ja jokaisella kiinteõllõ x ╬ [ a, b ], funktio
y « f(x, y) on integroituva (y:n suhteen) võlillõ [ c, d ].
Silloin funktio
on integroituva võlillõ [ a, b ], ja põtee
|
|
¾
§
R
|
f = |
b
¾
§
a
|
g(x) dx = |
b
¾
§
a
|
|
µ
Þ
|
d
¾
§
c
|
f(x, y) dy |
÷
°
|
dx. |
|
Merkitõõn
|
|
b
¾
§
a
|
|
d
¾
§
c
|
f(x, y) dx dy |
µ
Þ
|
tai joskus my÷s |
b
¾
§
a
|
|
d
¾
§
c
|
f(x, y) dy dx |
÷
°
|
. |
|
Esimerkki 15
Laske
kun R = [ 0, 2 ]×[ -1, 1 ] = { (x, y) | 0 ú x ú 2, -1 ú y ú 1 }.
Ratkaisu.
|
|
| | |
|
2
¾
§
0
|
|
1
¾
§
-1
|
(1 - 6x2 y) dx dy = |
2
¾
§
0
|
|
µ
Þ
|
1
¾
§
-1
|
(1 - 6x2y) dy |
÷
°
|
dx |
|
| | |
|
2
¾
§
0
|
|
µ
Þ
|
Ú
Ù
|
y - 3x2y2 |
¨
¹
|
1
y = -1
|
÷
°
|
dx = |
2
¾
§
0
|
(1 - 3x2 ·1) - (-1 -3x2(-1)2) dx |
|
| | |
|
|
|
Lause 16
Olkoot f1 : [ a, b ] « R, f2 : [ a, b ] « R
jatkuvia funktioita, joille f1(x) < f2(x), " x ╬ ] a, b [
sekõ f1(a) ú f2(a), f1(b) ú f2(b).
Oletetaan, ettõ f : A « R on integroituva, missõ
|
A = { (x, y) |
Û
Û
|
x ╬ [ a, b ], f1(x) ú y ú f2(x) }. |
|
Oletetaan, ettõ integraali
on olemassa kaikille x ╬ [ a, b ]. Silloin
|
|
¾
§
A
|
f = |
b
¾
§
a
|
|
µ
Þ
|
f2(x)
¾
§
f1(x)
|
f(x, y) dy |
÷
°
|
dx. |
|
Katso kuvat 35 ja 36.
Esimerkki 17
Olkoon f1(x) = 0, f2(x) = x ja f(x, y) = 3 - x - y. Nyt
x ╬ [ 0, 1 ], joten
|
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
x
¾
§
0
|
3 - x - y dy |
÷
°
|
dx = |
1
¾
§
0
|
|
Ú
Ù
|
3y - xy - |
1
2
|
y2 |
¨
¹
|
x
y = 0
|
dx |
|
| | |
|
1
¾
§
0
|
(3x - x2 - |
1
2
|
x2) dx = |
1
¾
§
0
|
(3x - |
3
2
|
x2) dx |
|
| | |
|
¾
§
| |
Ú
Ù
|
3
2
|
x2 - |
1
2
|
x3 |
¨
¹
|
1
x = 0
|
= 1. |
|
|
|
|
Katso kuva 37.
Erityisesti siinõ tapauksessa, ettõ f on jatkuva, edellõ mainitut integraalit ovat olemassa ja
kaava põtee.
Vastaavasti: Jos integroimisalue A on muotoa
|
A = {(x, y) |
Û
Û
|
c ú y ú d, y1(y) ú x ú y2(y) } |
|
ja f on jatkuva A:ssa, niin
|
|
¾
§
A
|
f = |
d
¾
§
c
|
|
µ
Þ
|
y2(y)
¾
§
y1(y)
|
f(x, y) dx |
÷
°
|
dy. |
|
(Tõssõ y1(y) < y2(y) kaikilla y ╬ [ c, d ] jne.)
Edellinen esimerkki voidaan siis laskea my÷s seuraavasti:
f(x, y) = 3 - x - y, y ╬ [ 0, 1 ] ja
y1(y) ú x ú y2(y). Nyt y ú x ú 1 eli y1(y) = y ja
y2(y) = 1. Saadaan
|
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
1
¾
§
y
|
f(x, y) dx |
÷
°
|
dy = |
1
¾
§
0
|
|
Ú
Ù
|
3x - |
1
2
|
x2 - xy |
¨
¹
|
1
x = y
|
dy |
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
3 - |
1
2
|
- y - |
µ
Þ
|
3y - |
1
2
|
y2 - y2 |
÷
°
|
÷
°
|
dy |
|
| | |
|
1
¾
§
0
|
|
µ
Þ
|
3
2
|
y2 - 4y + |
5
2
|
÷
°
|
dy = ╝ = 1. |
|
|
|
|
Esimerkki 18
Integroimisjõrjestyksen vaihtaminen (katso kuva 38).
Tarkastellaan integraalia
|
I = |
2
¾
§
0
|
|
µ
Þ
|
2x
¾
§
x2
|
(4x + 2) dy |
÷
°
|
dx, |
| (25) |
Tõssõ x ╬ [ 0, 2 ], x2 : = f1(x) ú y ú f2(x) : = 2x;
huomaa, ettõ kun x ú 2, niin x2 = x ·x ú 2x.
Tehtõvõnõ on lausua integraali 25 muodossa
|
|
d
¾
§
c
|
|
µ
Þ
|
y2(y)
¾
§
y1(y)
|
(4x + 2) dx |
÷
°
|
dy, |
|
missõ y ╬ [ 0, 4 ], siis c = 0, d = 4. Mutta mitõ ovat funktiot y1, y2?
|
|
Figure 38: Integrointijõrjestys
|
Reunakõyrõllõ f1 põtee eli y = f1(x) = x2 jos Íy = x; siten y2(y) = Íy
(katso kuva 38).
Reunakõyrõllõ f2 on y = f2(x) = 2x eli x = [(y)/2]; siten y1(y) = [(y)/2].
Siis,
|
I = |
4
¾
§
0
|
|
µ
Þ
|
Íy
¾
§
y/2
|
(4x + 2) dx |
÷
°
|
dy. |
|
8.1 Muuttujien vaihto pintaintegraaleissa
Lause 1
Olkoon A ╠ R2 rajoitettu, ja d(A) nollamittainen ja
f : A « R jatkuva. Oletetaan, ettõ on olemassa jatkuvasti derivoituva bijektio
g : R « A, missõ R ╠ R2 on suorakulmio. Tõll÷in
|
|
¾
§
A
|
f = |
¾
§
R
|
(f ░g) ·| Jg |, |
|
missõ Jg on funktion g funktionaalideterminantti eli
jakobiaani,
|
Jg = |
Û
Û
Û
|
|
Û
Û
Û
|
= (D1g1)(D2g2) - (D2g1)(D1g2), |
|
missõ g = (g1, g2). Katso kuva 39.
|
|
Figure 39: Pintaintegraali
|
Esimerkki 2
Olkoon
|
A : = { (x, y) |
Û
Û
|
x2 + y2 ú a2 }. |
|
Huomaa, ettõ yllõ x ╬ [ -a, a ] ja
|
f1(x) = - |
Í
|
a2 - x2
|
ú y ú |
Í
|
a2 - x2
|
= f2(x). |
|
Tõmõ saattaa johtaa vaikeaan x-integraaliin. Tarkastellaan sen vuoksi funktiota g : R « A,
|
g(r, j) = (r cosj, r sinj), |
|
missõ r ╬ [ 0, a ] ja j ╬ [ 0, 2p] eli
(r, j) ╬ R: = [ 0, a ] ×[ 0, 2p]. Tõmõ g on surjektio.
Huomautus 3
Jos 1. g : R « A on injektio ja m(A \g(R)) = 0
tai 2. g : R « A on surjektio, ja ne pisteet, joilla on enemmõn kuin yksi alkukuva
muodostavat nollajoukon, niin Lause põtee edelleen.
Nyt
|
Jg = D1g1D2g2 - D2g1D1g2 = cosjr cosj- r(-sinj)sinj = r(cos2j+ sin2j) = r. |
|
Siis,
|
|
¾
§
A
|
f = |
a
¾
§
0
|
|
p
¾
§
0
|
f(rcosj, rsinj)r dr dj. |
|
Huomautus 4
Lause 8.1.1 põtee yleisimmillekin joukoille
R kuin suorakulmioille.
8.2 Kõyrõ- ja pintaintegraalien yhteys
Lause 1
(Erõs Greenin kaavoista)
Olkoon A ╠ R2 on rajoitettu ja d(A) Jordanin-kõyrõ joka koostuu õõrellisestõ mõõrõstõ
sõõnn÷llisiõ kaaria. Olkoon f : A « R2 on jatkuvasti derivoituva. Silloin
|
|
¾
§
A
|
(D1f2 - D2f1) = |
¾
§
dA
|
f1 dx + f2 dy. |
|
Oletetaan my÷s, ettõ d(A):lla on jatkuvasti derivoituva parametriesitys
j: D« dA siten, ettõ jó(t) ╣ 0 kaikilla t ╬ D.
Tõll÷in
|
|
¾
§
A
|
(D1f1 + D2f2) = |
¾
§
dA
|
(f · |
n
|
) ds, |
| (26) |
missõ [`(n)] on reunakõyrõn ulkonormaali: | [`(n)] | = 1,
| [`(n)] | ^d(A):n tangentti.
8.3 Integrointi yli pinnan
Olemme kõsitelleet edellõ, kuinka integroidaan yli tasoalueiden.
Tõllaista integraalia sanotaan pintaintegraaliksi, ja se
palautuu kaksinkertaiseen yhden muuttujan funktion
integrointiin.
Seuraavaksi otetaan hiukan yleisempi tapaus: integroidaan yli
pinnan, joka ei enõõ olekaan xy-tason alue, vaan pinta
|
E: = { ( x, y, z) ╬ R3 |
Û
Û
|
z = h(x, y), (x, y) ╬ A }, |
|
missõ A on joku sopiva xy-tason osajoukko. Joukko E on siis
R3:n osajoukko, pinta, joka on kahden
muuttujan funktion h kuvaaja (esimerkiksi A:n ylõpuolella). (Piirrõ kuva,
kun esimerkiksi A on tason yksikk÷neli÷, ja h on funktio
h(x,y) = 1 + x2).
Oletamme, ettõ kolmen muuttujan funktio f on mõõritelty joukossa
E. Silloin sen integraalia yli pinnan E merkitõõn
ja se mõõritellõõn kaavalla
|
|
¾
§
E
|
f : = |
¾
§
A
|
f(x, y, h(x,y)) |
Í
|
1 + D1 h(x,y)2 + D2 h(x,y)2
|
dx dy. |
| (28) |
Huomautus 1
Siinõ tapauksessa, ettõ f on vakiofunktio 1, tõmõ
integraali antaa pinnan E pinta-alan.
Esimerkki 2
Tarkastellaan funktion h(x,y): = Í{1 - x2 - y2}
mõõrõõmõõ pintaa E joukossa R3, kun (x,y) ╬ A,
ja A on xy-tason yksikk÷kiekko (siis joukko {x2 + y2 < 1}). Piirrõ
kuva: Pinta E on avaruuden yksikk÷pallon kuoren ylempi puolikas.
Laskemme E:n pinta-alan, eli integroimme vakiofunktiota (25) yli
pinnan E.
Saamme ensinnõkin (laske!)
|
D1 h (x,y)2 = |
x2
1 - x2 - y2
|
|
| (29) |
ja
|
D2 h (x,y)2 = |
y2
1 - x2 - y2
|
. |
| (30) |
Edelleen kaavassa (28)
|
|
|
|
Í
|
1 +D1 h(x,y,)2 + D2 h(x,y)2
|
|
| | |
|
µ
Í
|
|
1 + |
x2
1 - x2 - y2
|
+ |
y2
1 - x2 - y2
|
|
|
|
| | |
|
|
|
Siirtymõllõ napakoordinaatteihin saadaan (28) muotoon
Stokesin kaavan kõsittely joudutaan jõttõmõõn ajan puutteen vuoksi
pois. Katso tarvittaessa kirjallisuudesta.
9 Avaruusintegraalit
Siirrymme tarkastelemaan kolmen muuttujan funktioiden integrointia
yli avaruuden R3 osajoukon A. Ajatus on siis se, ettõ
yleistetõõn aiempi tasoalueiden yli integrointi (ei yllõ oleva
ïntegrointi yli pinnan", vaan sitõ edeltõvõ tarkastelu)
tapaukseen jossa on yksi muuttuja enemmõn.
Integraalin kõsite ja siihen liittyvõt mittateoreettiset kõsitteet
mõõritellõõn analogisesti kahden muuttujan funktion tapauksen
kanssa. Jõtõmme tõssõ yksityiskohdat võliin.
Avaruusintegraalia merkitõõn esim.
|
|
¾
§
A
|
f tai |
¾
§
|
|
¾
§
A
|
|
¾
§
|
f(x,y,z) dx dy dz. |
|
Kuten arvata saattaa pintaintegraalien tapauksesta,
avaruusintegraalin laskeminen palautuu kolminkertaiseen
integrointiin. Olkoon ensiksi A koordinaattiakselien
suuntainen suuntaissõrmi÷
|
A : = { (x,y,z) | a1 ú x ú a2 , b1 ú y ú b2 , c1 ú z ú c2 } |
|
eli A = [a1, a2] ×[b1, b2] ×[c1, c2], missõ
a1 jne. ovat jotain reaalilukuja. Tõll÷in
|
|
¾
§
A
|
f = |
a2
¾
§
a1
|
|
µ
Þ
|
b2
¾
§
b1
|
|
µ
Þ
|
c2
¾
§
c1
|
f (x,y,z) dz |
÷
°
|
dy |
÷
°
|
dx. |
| (31) |
Olettaen ettõ f on riittõvõn siisti, esimerkiksi jatkuva,
joukossa A, integroinnit kaavassa (31) voi suorittaa missõ
jõrjestyksessõ tahansa:
|
|
¾
§
A
|
f = |
b2
¾
§
b1
|
|
µ
Þ
|
c2
¾
§
c1
|
|
µ
Þ
|
a2
¾
§
a1
|
f (x,y,z) dx |
÷
°
|
dz |
÷
°
|
dy = |
c2
¾
§
c1
|
|
µ
Þ
|
b2
¾
§
b1
|
|
µ
Þ
|
a2
¾
§
a1
|
f (x,y,z) dx |
÷
°
|
dy |
÷
°
|
dz ╝ |
|
Integraalit yli monimutkaisempien joukkojen lasketaan kuten kahden
muuttujan tapuksessakin. Oletetaan, ettõ on annettu kahden
muuttujan funktiot j1 ja j2, missõ j1(x,y) ú j2 (x,y), kun a1 ú x ú a2 ja b1 ú y ú b2. Olkoon
nyt
|
A : = { (x,y,z) | a1 ú x ú a2 , b1 ú y ú b2 ,j1 (x,y) ú z ú j2 (x,y) } . |
|
(Hahmottele kuva joukosta A, kun j1 ja j2 ovat
jotain sopivia funktioita.) Tõll÷in
|
|
¾
§
A
|
f = |
a2
¾
§
a1
|
|
µ
Þ
|
b2
¾
§
b1
|
|
µ
Þ
|
j2 (x,y)
¾
§
j1 (x,y)
|
f (x,y,z) dz |
÷
°
|
dy |
÷
°
|
dx. |
|
Tõssõ x- ja y-integrointien jõrjestyksen voi vaihtaa.
Vielõ yleisemmin, jos
|
A : = { (x,y,z) | a1 ú x ú a2 , y1(x) ú y ú y2 (x) , j1 (x,y) ú z ú j2 (x,y) } |
|
joillekin sopiville funktioille y1 jne., niin
|
|
¾
§
A
|
f = |
a2
¾
§
a1
|
|
µ
Þ
|
y2 (x)
¾
§
y1(x)
|
|
µ
Þ
|
j2 (x,y)
¾
§
j1 (x,y)
|
f (x,y,z) dz |
÷
°
|
dy |
÷
°
|
dx. |
|
9.1 Muuttujan vaihto avaruusintegraalissa
Olkoon R ╠ R3 koordinaattiakselien suuntainen
suuntaissõrmi÷, A ╠ R3 kuten yllõ sekõ g : R« A jatkuvasti derivoituva bijektio. Olkoon f joukossa A
mõõritelty funktio, jota halutaan integroida. Pintaintegraalien
tapaan voidaan suorittaa muuttujanvaihto kaavalla
|
|
¾
§
A
|
f = |
¾
§
R
|
(f ░g) | Jg |, |
|
missõ Jg on kuvauksen g Jacobin determinantti ( 3 ×3-determinantti, jonka j:nnen rivin i:s alkio on Di gj).
Tarkastellaan tapausta, ettõ g võlittõõ siirtymisen
pallokoordinaatteihin, eli g : R « A ,
|
g( r, j, y) : = ( r cosjcosy, r cosjsiny, r sinj) |
|
|
R: = { (r , j, y) | 0 ú r ú a , -p/ 2 ú j ú p/2, 0 ú y ú 2 p} |
|
ja A on avaruuden 0-keskinen, a-sõteinen pallo
|
A = { (x,y,z) | x2 + y2 + z2 ú a2 }, |
|
Tõll÷in Jg on
9.2 Pinta-ja avaruusintegraalien võlinen yhteys
Olkoon A ╠ R3 suljettu ja rajoitettu joukko, jonka reuna
muodostaa pinnan S. Olkoon f: A « R3 mõõritelty
jatkuvasti derivoituva vektorikenttõ sekõ [`(n)] pinnan S
ulkonormaali(vektori). Divergenssikaava yhdistõõ avaruus- ja
pintaintegraalit seuraavasti:
Mikõli vektorikentõllõ f on
potentiaali u, eli f = Ðu, saadaan erikoistapauksena
Gaussin kaava
File translated from
TEX
by
TTH,
version 3.01.
On 27 Sep 2002, 11:30.
|