Averaging GPS segments

RESULTS
6.6.2019
| Rank | Method | Training | Testing | Difference | Length | Points | Time |
|---|---|---|---|---|---|---|---|
| A | 68.5% | 62.2% | 6.3% | 99% | 9882% | 30 min | |
| 1 | B | 67.1% | 62.0% | 5.1% | 99% | 89% | seconds |
| 2 | C | 70.4% | 61.8% | 8.6% | 101% | 83% | seconds |
| 3 | D | 68.0% | 61.8% | 6.2% | 99% | 83% | seconds |
| E | 68.3% | 61.7% | 6.6% | 99% | 145% | 30 min | |
| 4 | F | 66.6% | 61.5% | 5.1% | 100% | 70% | seconds |
| 5 | G | 67.4% | 61.2% | 6.2% | 100% | 107% | 10 min |
| 6 | H | 66.6% | 61.2% | 5.4% | 102% | 205% | seconds |
| 7 | I | 68.1% | 60.9% | 7.2% | 99% | 67% | seconds |
| MEDOIDS | |||||||
| DTW | 57.3% | 55.3% | 2.0% | 97% | 159% | ~ 1 hour | |
| ERP | 58.0% | 55.9% | 2.1% | 97% | 182% | ~ 1 hour | |
| Euclidean | 58.3% | 54.8% | 3.5% | 97% | 175% | ~ 1 hour | |
| Frechet | 59.9% | 55.2% | 4.7% | 97% | 210% | ~ 1 hour | |
| Hausdorff | 61.2% | 56.4% | 4.8% | 99% | 121% | ~ 1 hour | |
| IRD | 61.9% | 56.7% | 5.2% | 98% | 169% | ~ 1 hour | |
| LCSS* | 59.0% | 54.4% | 4.6% | 99% | 202% | ~ 1 hour | |
| EDR* | 58.5% | 54.5% | 4.0% | 99% | 210% | ~ 1 hour | |
| C-SIM* | 58.3% | 54.8% | 3.5% | 98% | 190% | ~ 1 hour | |
| HC-SIM* | 58.9% | 55.3% | 3.6% | 98% | 190% | ~ 1 hour | |
| CellNet | 47.4% | 53.8% | -6.4% | 64.8% | 144% | seconds | |
| CellNet° | 64.7% | 61.2% | 3.5% | 96.3% | 144% | seconds | |
° order is given
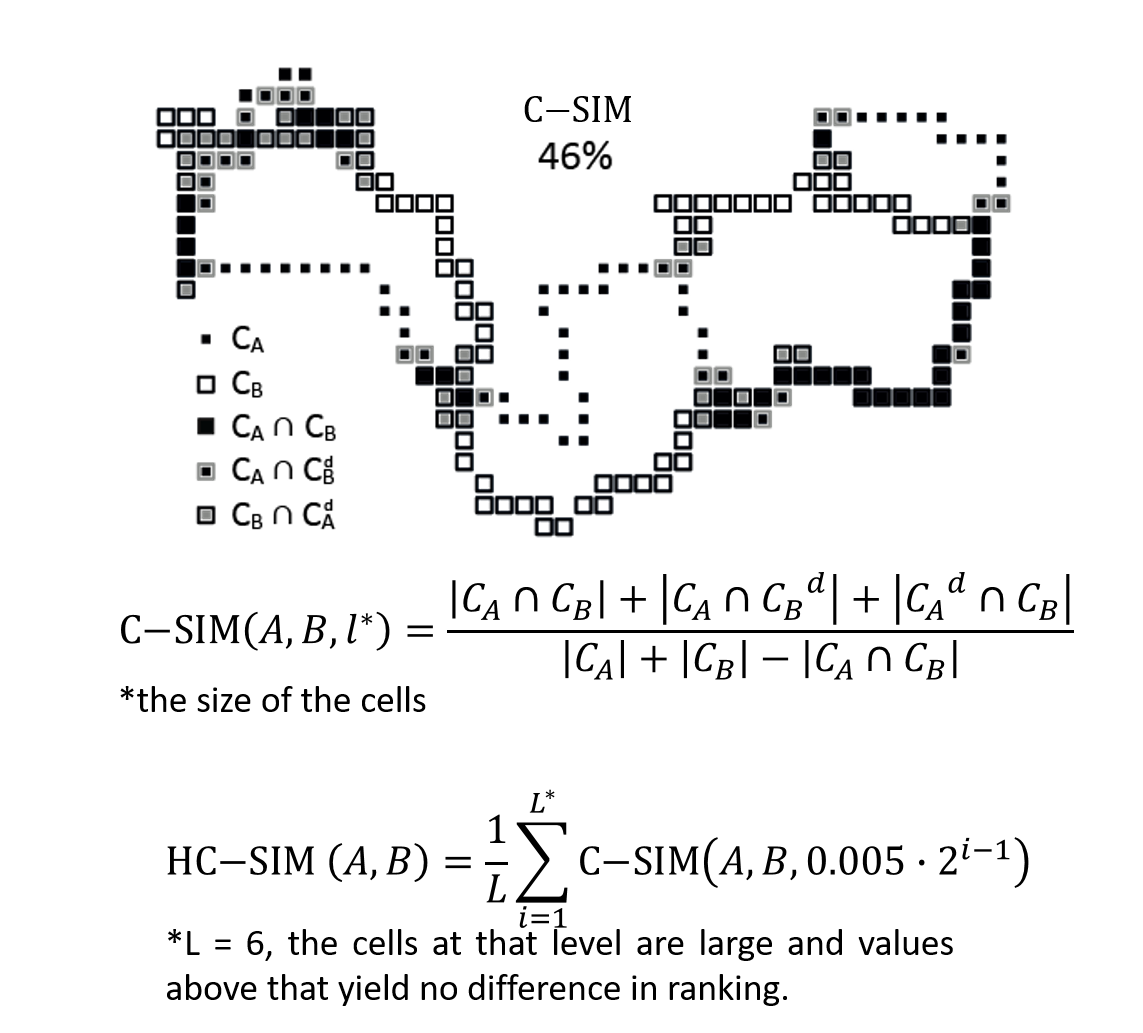
We evaluated using a novel similarity measure called HC-SIM (Hierarchical Cell Similarity). It is a parameter independent variant of C-SIM measure which uses a grid to assess similarity of trajectories. Source code is available here.
Submitted methods are evaluated at the top (A-I). They are followed by Medoids computed using different trajectory similarity measures act as a baseline. The averaging step described in the CellNet paper is also shown for reference.
These results are now documented in this paper:
Pasi Fränti and Radu Mariescu-Istodor (2020) "Averaging GPS segments competition 2019" Pattern Recognition.
Test set is now public and can be downloaded from here.
Submitted methods are evaluated at the top (A-I). They are followed by Medoids computed using different trajectory similarity measures act as a baseline. The averaging step described in the CellNet paper is also shown for reference.
These results are now documented in this paper:
Pasi Fränti and Radu Mariescu-Istodor (2020) "Averaging GPS segments competition 2019" Pattern Recognition.
Test set is now public and can be downloaded from here.